将Shape2DList转换为Pose2DList
使用场景
该步骤通常前接 检测并测量直线 步骤(用于获得直线的倾斜角 Theta)及 检测并测量圆 步骤(用于获得圆心的 X、Y 坐标),用于输出较为精确的图像中物体 2D 位姿信息, 然后后接 记录基准位姿并计算变换 步骤中,用于精确地对齐一组图像中的物体。
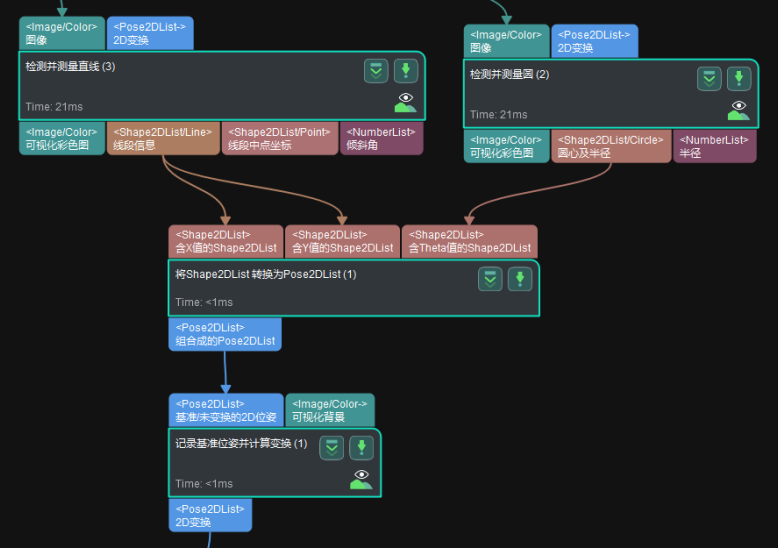
上述操作通常用于 2D模板匹配 步骤后,使得“2D模板匹配”步骤的结果调整得更精确。若各图像中的物体已接近对齐,则可不使用“2D模板匹配”步骤。
该步骤通常前接 检测并测量直线 步骤(用于获得直线的倾斜角 Theta)及 检测并测量圆 步骤(用于获得圆心的 X、Y 坐标),用于输出较为精确的图像中物体 2D 位姿信息, 然后后接 记录基准位姿并计算变换 步骤中,用于精确地对齐一组图像中的物体。
上述操作通常用于 2D模板匹配 步骤后,使得“2D模板匹配”步骤的结果调整得更精确。若各图像中的物体已接近对齐,则可不使用“2D模板匹配”步骤。