选择机器人手眼标定流程
手眼标定是指建立相机坐标系与机器人坐标系对应关系的过程。通过手眼标定,可将相机获取的物体或特征的位姿,准确转换为机器人坐标系下的位姿。手眼标定精度是影响机器人作业精度的重要因素之一。
当搭建完成梅卡曼德视觉系统后,你可以进行机器人手眼标定。此外,在如下情况下,你需要重新进行机器人手眼标定:
-
相机相对于机器人底座(相机Eye to hand安装方式)或者法兰(相机Eye in hand安装方式)发生位置变化。
-
更换相机。
-
更换机器人。
-
机器人的工作环境或布局发生更改。
-
抓取精度要求提高。
-
发生撞击或者移动导致机器人或相机位置发生变化。
-
出现抓不准问题且外参误差变大。
-
校正了相机内参。
-
应用长期运行(为保证系统稳定性,需要定期重新进行手眼标定)。
选择合适的标定流程
机器人通信方式、相机安装方式、标定方式和采集标定数据方法,都影响具体的标定过程。Mech-Vision针对不同场景提供了标准化的标定流程,方便快速和准确地完成相机内参和外参的标定。
|
关于机器人通信方式、相机安装方式、标定方式和采集标定数据方法的解释,请参考 标定相关概念。 |
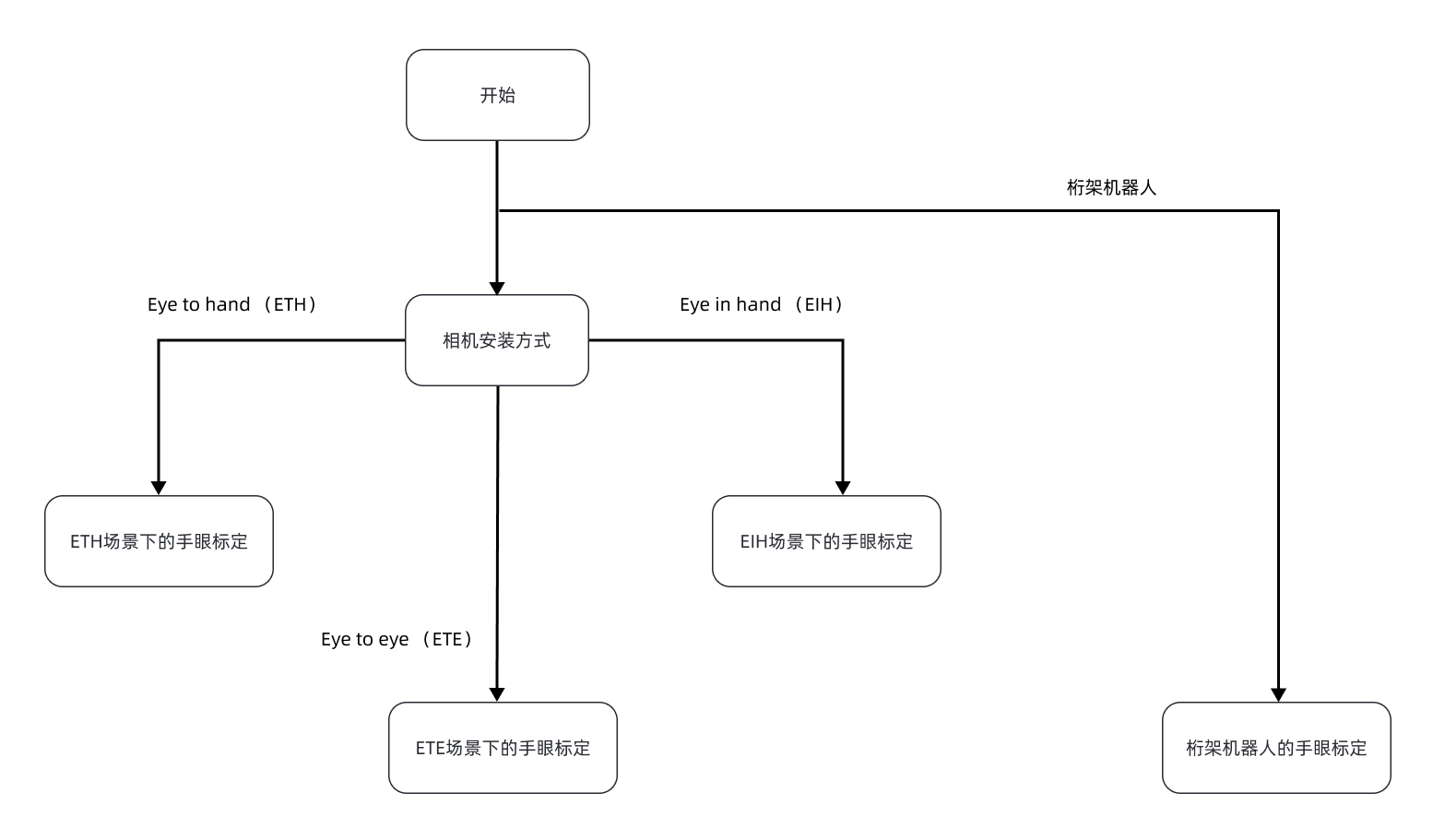
请根据相机安装方式选择相应的标定流程。
-
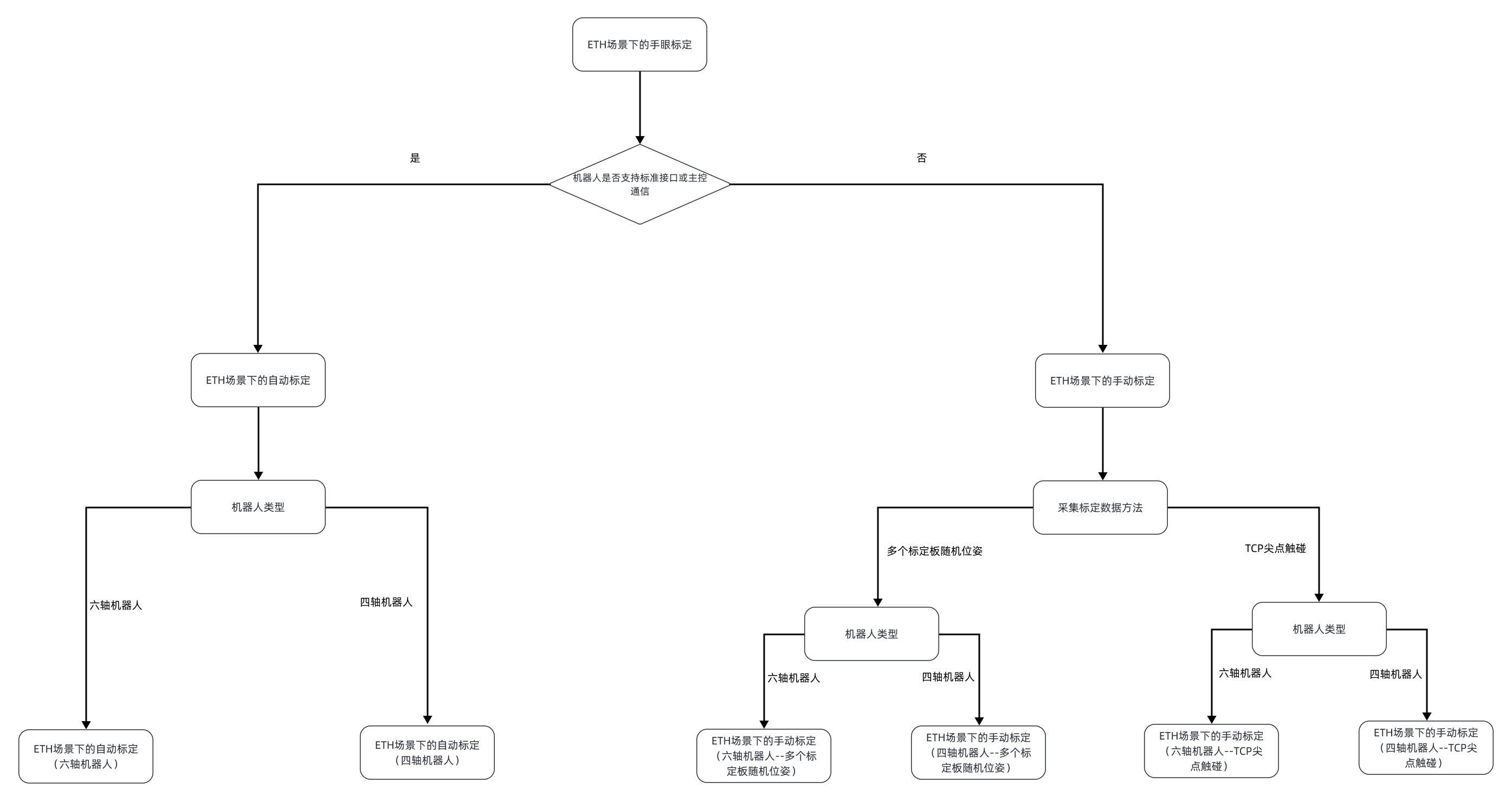
如果相机安装方式为Eye to hand(ETH),请参考ETH场景下的手眼标定进行进一步选择。
-
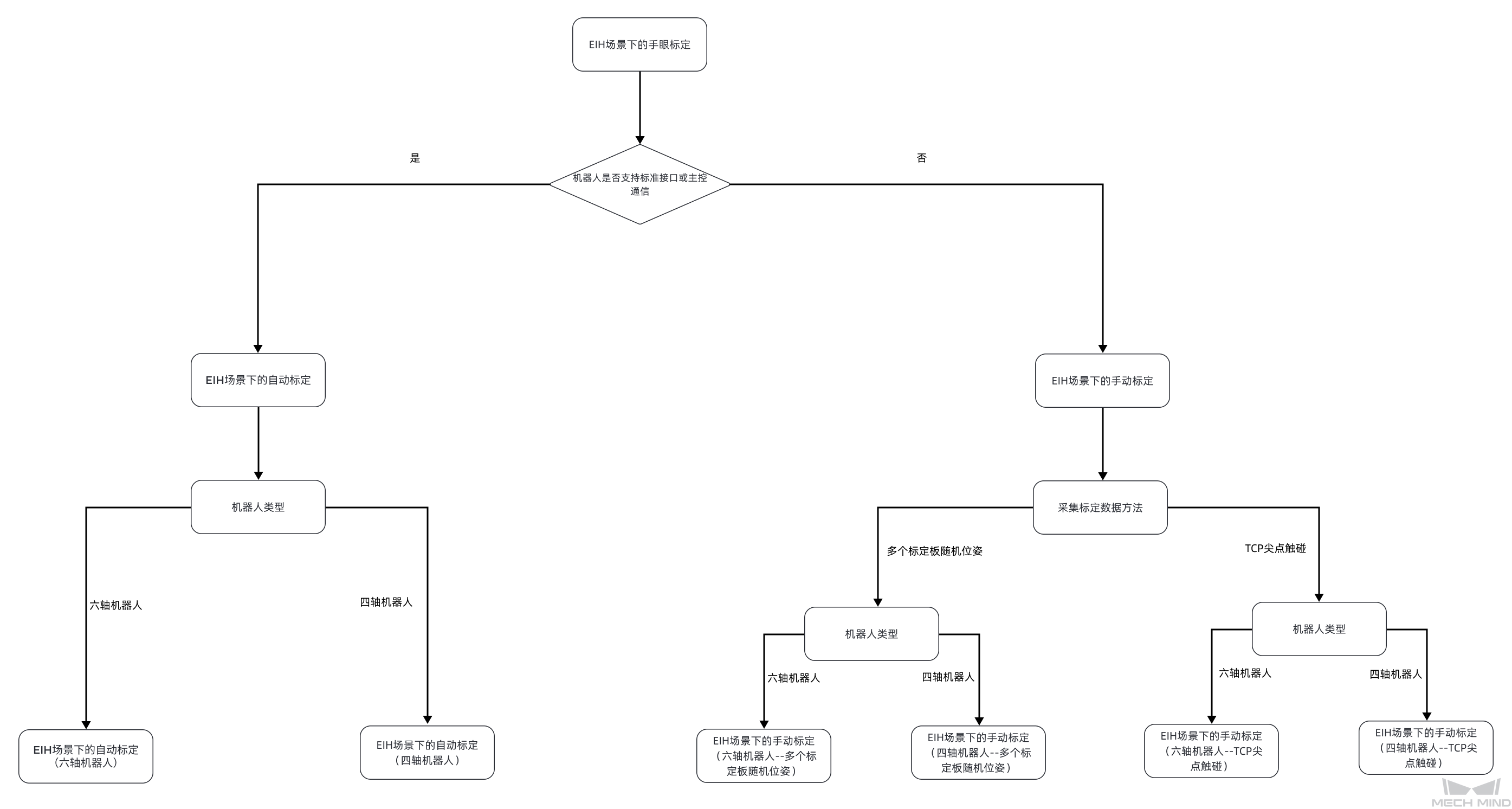
如果相机安装方式为Eye in hand(EIH),请参考EIH场景下的手眼标定进行进一步选择。
-
如果相机安装方式为Eye to eye(ETE),请参考ETE场景下的手眼标定流程进行标定。
| 如果项目使用的机器人为桁架机器人,那么请参考桁架机器人的手眼标定流程进行标定。 |