给定轴和角度,旋转位姿
参数说明
可视化设置
| 参数 | 解释 |
|---|---|
位姿显示设置 |
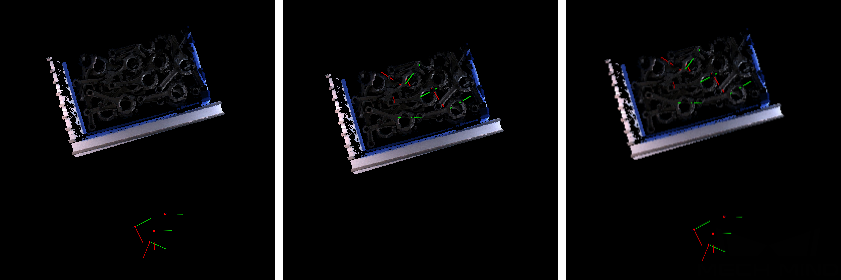
参数解释:该参数用于设置位姿的显示形式。 默认值:只显示输出位姿 值列表:只显示输出位姿、只显示输入位姿、输入与输出一同显示 调节说明:根据实际需求,在下拉列表中选择合适的位姿显示设置。具体效果见 调节示例 。 |
| 参数 | 解释 |
|---|---|
位姿显示设置 |
参数解释:该参数用于设置位姿的显示形式。 默认值:只显示输出位姿 值列表:只显示输出位姿、只显示输入位姿、输入与输出一同显示 调节说明:根据实际需求,在下拉列表中选择合适的位姿显示设置。具体效果见 调节示例 。 |