了解深度学习
在部分视觉识别过程中,传统的匹配、聚类方法可能无法实现较好的效果,例如在抓取高反光工件时,点云质量较差,导致 3D 匹配方法无法输出准确的识别结果。另外,抓取紧密贴合的工件时,聚类效果不理想,也会对视觉识别和机器人抓取产生影响。基于上述情况,可考虑使用深度学习辅助识别。
深度学习属于人工智能技术范畴,包含复杂的神经网络模型,输入大量数据后,深度学习可模拟人的学习过程,在大量数据中预测或寻找规律,完成数据特征提取,然后执行相关任务。
梅卡曼德在 3D 视觉引导机器人抓取领域提供了实例分割算法模块,当传统的方法无法达到预期效果时,可使用实例分割方法辅助识别。下文将介绍各个抓取类场景下实例分割算法模块的效果。
工件上下料场景
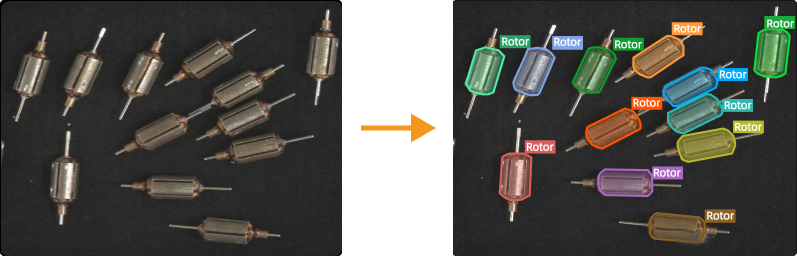
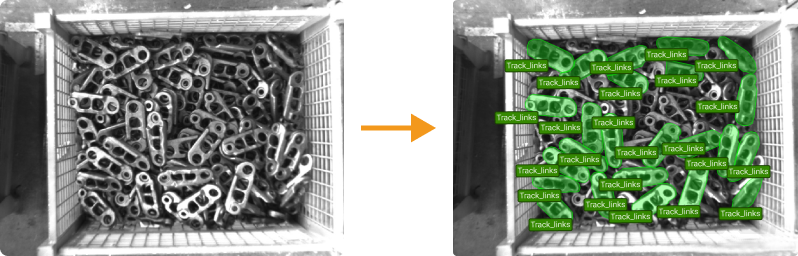
工件上下料场景指的是汽车、钢铁、机械等行业中复杂工件、结构件、不规则零部件等物体的搬运抓取,实例分割算法模块可分割出每个目标物体的轮廓,同时输出类别标签,例如分割散乱压叠的转子、链轨节,如下图所示。