将深度图转换为点云
功能描述
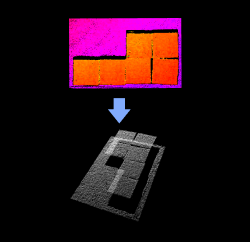
该步骤可通过深度图和彩色图生成点云。
|
相似步骤对比: 从相机获取图像 也可以直接输出点云和彩色点云。但为了提升工程运行速度,一般使用将深度图转换为点云步骤作为获取点云和彩色点云的途径。 使用将深度图转换为点云步骤截取感兴趣区域可以减少不必要点云的数量,进而提升运行速度。 |
参数说明
| 参数 | 解释 | 图示 |
|---|---|---|
深度图 ROI 文件 |
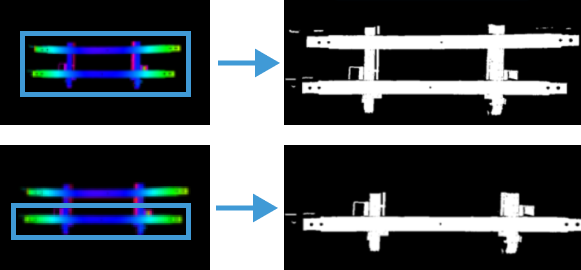
调节说明:截取深度图感兴趣区域。
调节示例:截取不同感兴趣区域进行对比。如右图所示,左图为深度图感兴趣区域,右图为输出的点云。 |
|
该步骤可通过深度图和彩色图生成点云。
|
相似步骤对比: 从相机获取图像 也可以直接输出点云和彩色点云。但为了提升工程运行速度,一般使用将深度图转换为点云步骤作为获取点云和彩色点云的途径。 使用将深度图转换为点云步骤截取感兴趣区域可以减少不必要点云的数量,进而提升运行速度。 |
| 参数 | 解释 | 图示 |
|---|---|---|
深度图 ROI 文件 |
调节说明:截取深度图感兴趣区域。
调节示例:截取不同感兴趣区域进行对比。如右图所示,左图为深度图感兴趣区域,右图为输出的点云。 |
|