3D方法估计点云边缘
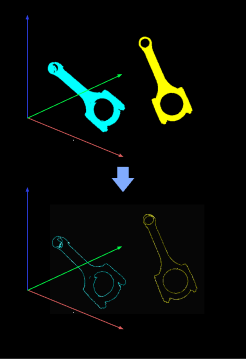
点云边缘提取流程
该步骤提取点云边缘的流程如下:
-
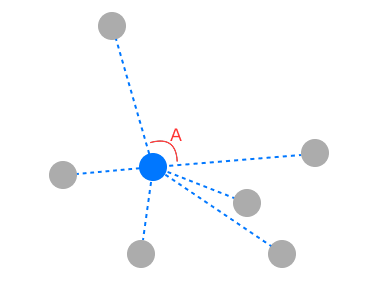
根据指定的邻近点搜索方式搜索某个点附近的若干点,然后将该点与其他点连线。
-
将相邻两条连线形成的最大夹角与设置的角度阈值进行对比,若最大夹角大于角度阈值,该点被判断为边缘点。
如下图所示,蓝色点为空间中某一点,灰色点为搜索到的若干点,此时角度阈值设置为 90°。∠A 为连线形成的最大夹角,且 ∠A > 90°,则可判断蓝色点为边缘点。
下文将对上述流程相关参数进行介绍。
该步骤提取点云边缘的流程如下:
根据指定的邻近点搜索方式搜索某个点附近的若干点,然后将该点与其他点连线。
将相邻两条连线形成的最大夹角与设置的角度阈值进行对比,若最大夹角大于角度阈值,该点被判断为边缘点。
如下图所示,蓝色点为空间中某一点,灰色点为搜索到的若干点,此时角度阈值设置为 90°。∠A 为连线形成的最大夹角,且 ∠A > 90°,则可判断蓝色点为边缘点。
下文将对上述流程相关参数进行介绍。