沿指定方向移动位姿
参数说明
可视化设置
| 参数 | 解释 |
|---|---|
在选定坐标系下显示点云 |
默认值:机器人坐标系 值列表:机器人坐标系、相机坐标系 调节说明:可参考 在选定坐标系下显示点云。 |
位姿显示设置 |
默认值:只显示输出位姿 值列表:只显示输出位姿、只显示输入位姿、输入与输出一同显示。 调节说明:可参考 在选定坐标系下显示点云。 |
调节示例
-
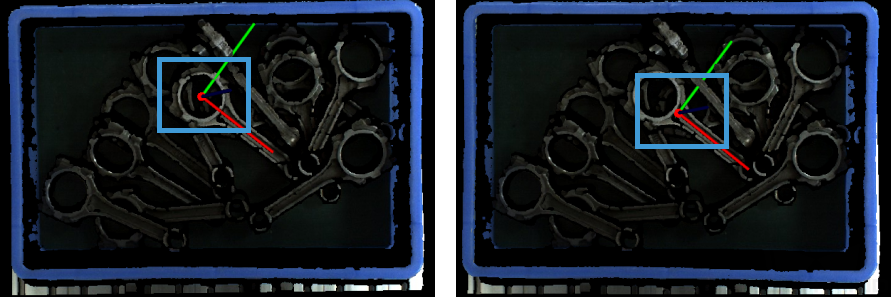
当参考方向为 ObjectAxis,指定轴为 X 轴,移动距离分别为 0 和 0.03 mm 时,位姿移动效果如下图所示。其中左图位姿移动距离为 0,右图为左图位姿沿 X 轴方向移动 0.03 mm 后的结果。
-
当参考方向为 ObjectAxis,指定轴为 Y 轴,移动距离分别为 0 和 0.03 mm 时,位姿移动效果如下图所示。其中左图位姿移动距离为 0,右图为左图位姿沿 Y 轴方向移动 0.03 mm 后的结果。

-
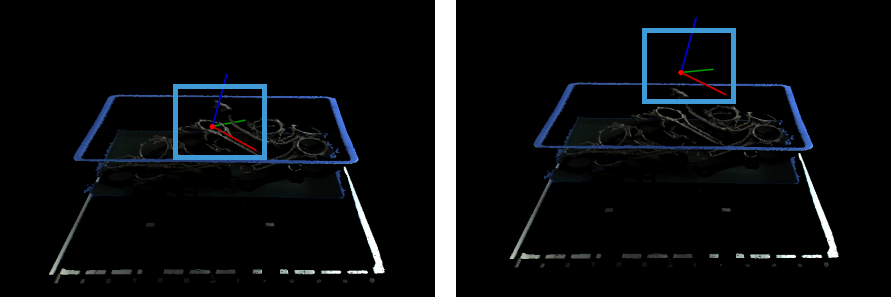
当参考方向为 ObjectAxis,指定轴为 Z 轴,移动距离分别为 0 和 0.08 mm 时,位姿移动效果如下图所示。其中左图位姿移动距离为 0,右图为左图位姿沿 Z 轴方向移动 0.08 mm 后的结果。
-
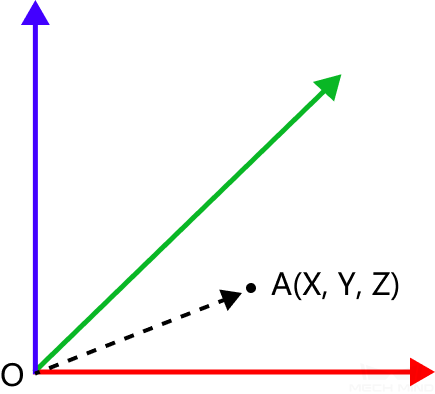
当参考方向为 CustomizedDirection 时,需在自定义方向中设置 X、Y、Z 的值。如下图所示,原点 O 到 A(X, Y, Z)的方向即为位姿平移的方向。
当 X、Y、Z 分别设置为 5 ,移动距离为 0.08 mm 时,位姿移动效果如下图所示。其中左图为移动前的位姿,右图为左图在自定义方向上移动 0.08 mm 的结果。
