自动切换工具
应用场景
-
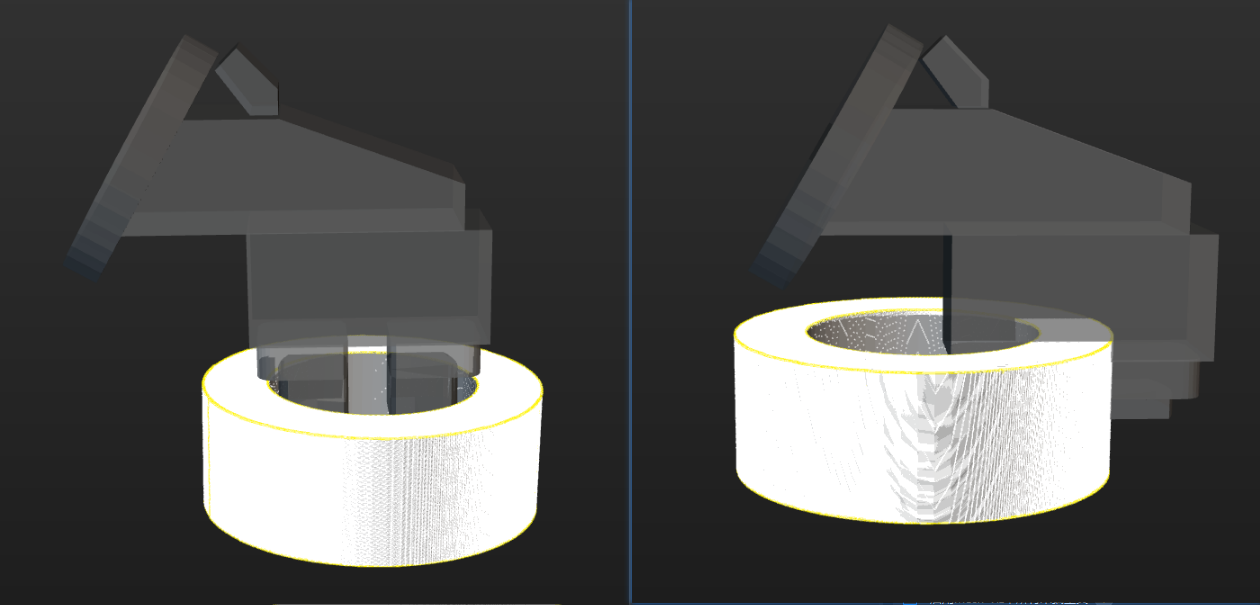
适用于使用同一工具以多种方式抓取工件的场景。如抓取圆环时,可以从圆环内部撑开夹爪抓取,也可以从外部合拢夹爪夹取。
-
不适用于需要机器人移动到快换台,将当前末端工具实际切换到另一个末端工具的场景。
| 本样例展示使用同一工具,以多种方式抓取工件的效果。 |
使用前提
-
主控通信方式下,在工程资源树中完成常规工具控制逻辑配置。
-
点击工程资源树中末端工具右侧的
 ,打开末端工具配置窗口,添加工具并完成相关设置。
,打开末端工具配置窗口,添加工具并完成相关设置。 -
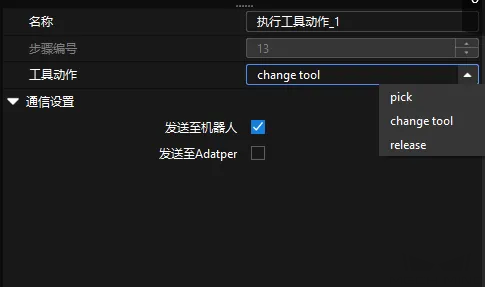
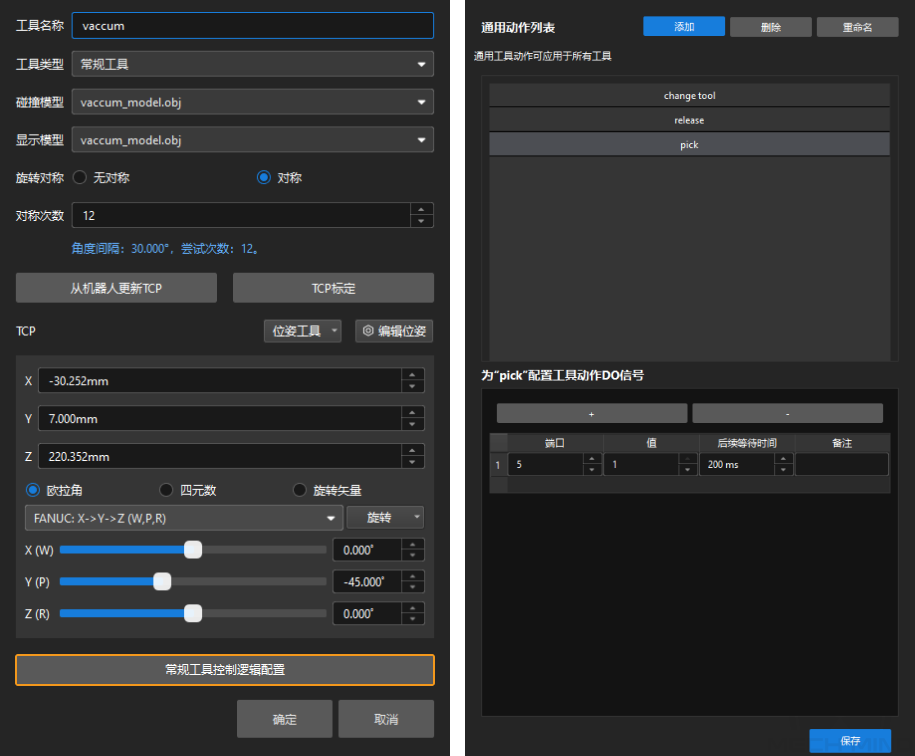
点击窗口最下方的常规工具控制逻辑配置,完成相关配置。
-
在通用动作列表中添加所有工具共用的动作名称。
-
为不同末端工具相应的工具动作独立配置DO信号。
-
-
-
在工件库中完成抓取点与工具的对应关系配置。
在设置抓取点阶段,可在工具列表中启用所需的工具,方便在工件库中预览工具与抓取点的相对位置关系。 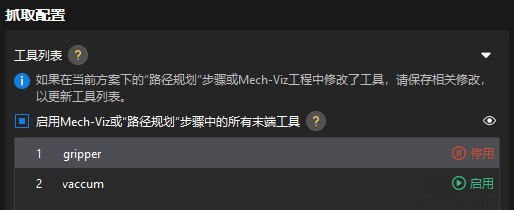
-
如使用标准接口程序或Adapter进行通信,需编写机器人端程序。本样例工程配备样例程序,请前往软件安装目录
Communication Component/Robot_Interface/FANUC/sample/MM_S7_Viz_SwitchTCP下载。如需了解样例程序的更多信息,请参考样例程序。