设置步骤参数
全局配置
规划全部视觉结果
勾选此参数后,路径规划工具在收到视觉结果后,循环运行当前流程以规划全部视觉结果,并在规划完成后输出所有规划得到的抓取路径。使用此功能需要设置规划中的循环起始步骤。
| 规划:软件尝试寻找一条机器人可以无碰撞到达目标位置的路径的过程。 |
规划中的循环起始步骤指的是循环的起始位置,在下图所示示例中,指定起始步骤为“定点移动_3”,软件将循环运行当前流程,直至视觉目标中的全部视觉结果被规划。

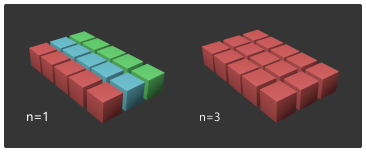
箱子拆垛
勾选此参数后,软件进入拆垛模式,使用此功能需搭配拆垛吸盘末端工具使用。此外需要根据实际场景选择拆垛方式。
| 开启箱子拆垛功能后,软件默认移除目标箱子的点云,且XY向点云移除范围拓展为10mm,Z向点云移除范围拓展为30mm。此功能的详细介绍请参见 移除目标工件点云。 |
单抓拆垛
单抓拆垛指每次只抓取一个箱子。
设置步骤如下:
-
单击工程资源树中末端工具右侧的+,打开末端工具配置窗口。
在此窗口中:
-
工具类型参数设置为拆垛吸盘。
-
单击拆垛吸盘配置打开吸盘配置器,参考吸盘配置器完成配置。
-
-
勾选全局配置中的箱子拆垛参数。
-
勾选单抓拆垛参数。
-
根据实际情况设置箱子覆盖率下限参数。
该参数限制吸盘在尝试抓取箱子时,吸盘覆盖箱子上表面的最小覆盖率。实际覆盖率高于此值视为可以抓取。
多抓拆垛
多抓拆垛指每次抓取多个箱子。
设置步骤如下:
-
打开末端工具配置工具。
-
工具类型参数设置为拆垛吸盘。
-
单击拆垛吸盘配置打开吸盘配置器,参考 吸盘配置器 完成配置。
-
-
勾选全局配置中的箱子拆垛参数。
-
勾选多抓拆垛参数。
-
根据实际情况设置以下参数:
-
箱子覆盖率下限
该参数限制吸盘在尝试抓取箱子时,吸盘覆盖箱子上表面的最小覆盖率。实际覆盖率高于此值视为可以抓取。
-
组合行数上限
在多抓组合过程中允许组合的最大箱子行数。
-
间距上限
该参数限制相邻两个箱子在组合方向上的最大间距,间距小于此值时,箱子可以组合为一组。
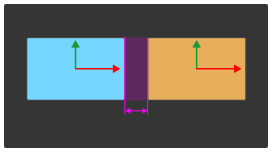
该参数值不应大于视觉结果中的箱子宽度,如果设置值大于箱子宽度,在实际运行中会被自动修改为箱子宽度。 -
偏出上限
该参数限制箱子在垂直于组合方向上的最大偏出距离,偏出距离小于此值时,箱子可以组合为一组。
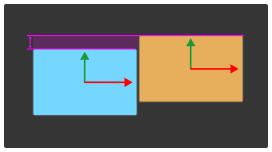
该参数值不应大于视觉结果中的箱子宽度,如果设置值大于箱子宽度,在实际运行中会被自动修改为箱子宽度。 -
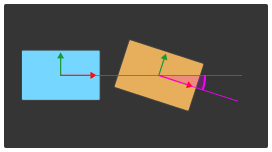
角度偏差上限
该参数限制箱子相对于组合方向的旋转偏差角度,旋转角度小于此值时,箱子可以组合为一组。
-
定点移动
设置一个固定位姿作为路径点。
参数说明
-
是否发送到机器人
调节说明:是否将此步骤对应的位姿发送给机器人。
调节示例:若选择规划但不发送,则路径规划步骤将不输出此步骤对应的位姿。
-
机器人运动方式
调节说明:机器人移动到此步骤对应位姿的运动方式。直线运动一般用于涂胶场景。
调节示例:若选择关节运动,则机器人将以关节运动的方式移动到此步骤对应的位姿。
-
路径点表示方式
调节说明:选择调整位姿的方式。
通过以下三种方式设置机器人位姿:
-
调整关节角位置。
-
拖拽三维仿真空间中的拖拽器。
-
将真实机器人的位姿输入该步骤。
-
通过示教器移动机器人,并记录工具位姿或关节角。
-
单击机器人面板中的编辑位姿(若选择TCP)或编辑关节位置(若选择关节角)。
-
输入记录的工具位姿或关节角,单击确认。仿真机器人将移动至对应的位姿。
-