部署校正方案
本节介绍在 EIH 相机安装方式下,如何部署视觉系统漂移自校正方案。
部署流程概览
校正方案部署流程如下图所示。

-
了解部署前提:了解部署“EIH系统漂移自校正”方案的前提。
-
完成准备工作:完成部署前的物料准备工作。
-
采集工位信息:采集不同工件层的标定板位姿,用于计算所需的标定球拍照点。
-
固定标定球:根据标定板位置信息和推荐的机器人法兰位姿,获取推荐的标定球固定位置,并按照要求固定标定球。
-
验证拍照点:在各拍照点统计标定球位姿的重复精度,以确保获得准确可靠的漂移校正数据。
-
启用自校正功能:在抓取工程中启用自校正功能,然后编写机器人自校正程序并运行,在实际生产过程中校正视觉系统的漂移。
-
查看部署结果:查看“EIH系统漂移自校正”方案的部署结果。
了解部署前提
部署校正方案前,需满足以下前提:
-
确保该工位已部署用于抓取的视觉方案。
-
确保已完成相机、机器人和外参精度检查,并实现机器人正常抓取。具体检查方法可参考精度误差分析工具。
-
确保该工位预留了固定标定球的空间。
开始部署
完成上述部署前准备后,即可在菜单栏依次选择打开工具,然后在工具首页右下角单击开始部署按钮,开始部署校正方案。
|
本文以直径 60 mm 标定球为例,介绍“EIH系统漂移自校正”方案部署流程。 |
采集工位信息
通过采集工位信息,本步骤可自动计算标定球拍照点。
定位标定板
完成上述步骤后,接下来请按如下图示和要求定位标定板,采集各个工件层的标定板位姿。

|
为使标定板定位准确,需保证相机视野中仅有一个标定板。 |
如果工件有序摆放,请单击此处查看如何定位标定板。
-
将标定板放置在最高层工件所在高度的中间位置。
对于较大尺寸的工件,需将标定板放置于工件的特征部位,即用于点云模板匹配的部位。
-
将机器人移动到工件层上方的拍照点,该拍照点必须和实际生产时的拍照点保持一致。
-
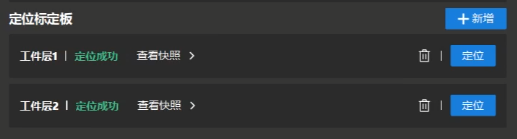
单击+新增,新增工件层。
-
单击定位,对当前工件层的标定板进行拍照。
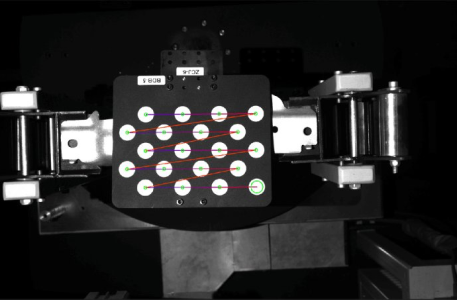
定位成功后,将提示定位成功,可单击查看快照,查看定位成功的标定板,如下图所示。
如定位失败,将提示定位失败,可单击框选标定板,在弹出的窗口中对标定板进行框选,或调整相机参数组后重试。
-
将标定板放置在第二、三···层,重复以上操作,直至各工件层信息采集完毕。
如果工件乱序堆叠,请单击此处查看如何定位标定板。
-
将标定板放置在底层工件层的中间位置。
对于较大尺寸的工件,需将标定板放置于工件的特征部位,即用于点云模板匹配的部位。
-
将机器人移动到工件层上方的拍照点,该拍照点必须和实际生产时的拍照点保持一致。
-
单击+新增,新增工件层。
-
单击定位,对当前工件层的标定板进行拍照。
定位成功后,将提示定位成功,可单击查看快照,查看定位成功的标定板,如下图所示。
如定位失败,将提示定位失败,可单击框选标定板,在弹出的窗口中对标定板进行框选,或调整相机参数组后重试。
-
将标定板放置在距离上个已定位工件层上方 20 cm 处,再次定位标定板。
-
重复以上操作,直至工件高度范围内的工件层信息采集完毕。
工位信息采集完成后,单击下一步,固定标定球。
固定标定球
在本步骤,根据标定板位置信息和推荐的机器人法兰位姿,可获取推荐的标定球固定位置,然后按照要求固定标定球。
放置标定板
-
按要求放置标定板。
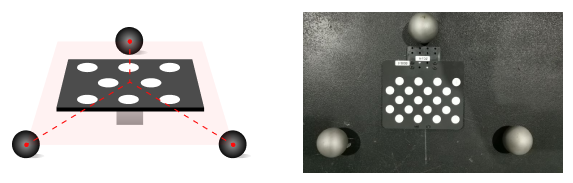
按照如下要求在未来放置标定球的空地上放置标定板。
-
确保标定板放置区域为机器人可达区域,且机器人不会与周围物体发生碰撞。
-
标定板应正面朝上,水平放置,且标定板四周应为放置标定球留出余地。
-
标定板下方一般需要物体支撑,尽可能保证标定板高度与标定球球心高度一致。
-
标定板上方无障碍物,确保机器人可正常移动至标定板上方。
-
-
定位标定板。
移动机器人,将相机调整至合适高度,确保在相机视野内可拍到清晰的标定板,并且标定板位于相机视野正中心,然后单击定位。
-
定位成功后,定位按钮左侧将提示定位成功,并显示标定板快照。此时需将当前机器人法兰位姿输入到界面上。
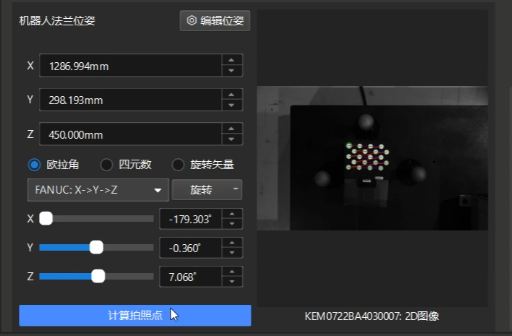
需注意检查机器人欧拉角类型,确保欧拉角类型选择正确。
-
如定位失败,定位按钮左侧将提示定位失败。此时可检查标定板图像质量是否符合要求。如不符合要求,需调整相机参数。如符合要求,可单击框选标定板,在弹出的窗口中对标定板进行框选。
-
-
计算拍照点。
标定板定位成功后,单击下方计算拍照点,自动计算标定球拍照点,即拍照时的机器人法兰位姿。
固定标定球
|
若在“采集工位信息”步骤中确认现场已固定了标定球,则在此步骤中只需设置“标定球直径”。 |
-
移动机器人。
“放置标定板”步骤获取到若干机器人法兰位姿后,当前页面将显示离标定球最近的机器人法兰位姿,作为推荐值。此时需将机器人移动至该推荐位姿,用于后续连续采集标定球图像。
移动机器人时,需确保机器人不会发生碰撞。推荐先手动将机器人低速移至目标位姿,时刻观察机器人是否会发生碰撞。
如果机器人在路径中有可能发生碰撞,可适当抬升标定球拍照点,但需保证拍照点抬升范围在 100 mm 以内。如果超过 100 mm,则需为标定球增加底座。

-
设置标定球尺寸。
根据实际准备的标定球,设置标定球直径。

-
固定标定球。
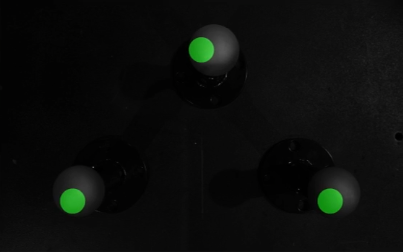
单击连续采集,按显示的推荐位置(绿色圆点处)固定标定球。
根据绿色圆点固定标定球时,绿色圆点不必完全与标定球球心重合。
-
将标定球牢固安装在地面上,实际生产时,避免误碰标定球。
-
使用记号笔在标定球和球座之间划线作为记号,用于后续检查标定球与球座的相对位置是否发生改变。
-
固定完成后,单击确认固定。
-
标定球固定后,单击下一步,验证标定球拍照点。
验证拍照点
本步骤用于在各拍照点统计标定球位姿的重复精度,以确保获得准确可靠的漂移校正数据。
-
将机器人移动至拍照点对应的法兰位姿,并将该位姿手动记录在机器人程序中。
移动机器人时,需确保机器人不会发生碰撞。推荐先手动将机器人低速移至目标位姿,时刻观察机器人是否会发生碰撞。
如果机器人在路径中有可能发生碰撞,可适当抬升标定球拍照点,但需保证拍照点抬升范围在 100 mm 以内。如果超过 100 mm,则需为标定球增加底座。
-
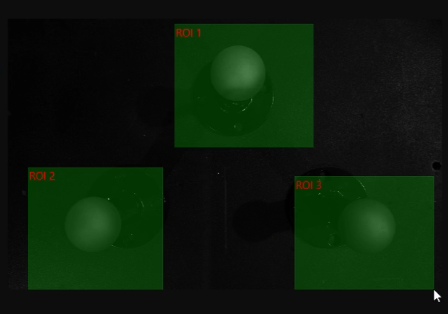
单击框选并验证,在每个拍照点处框选标定球,然后单击验证。
框选框需完全覆盖标定球,且标定球上下左右方向上各留有一个标定球直径的余量。若框选后提示“定位失败”,需检查“采集工位信息”步骤中的“标定球直径”是否设置有误。
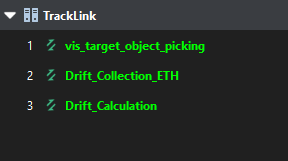
所有标定球拍照点验证完成后,单击保存按钮,保存已部署内容。此时将在当前方案下自动生成漂移校正相关工程:
-
Drift_Collection_EIH:即标定球位姿采集工程,用于在各拍照点采集标定球位姿。
-
Drift_Calculation:即漂移校正数据生成工程,基于“Drift_Collection_EIH”工程采集的标定球位姿生成漂移校正数据。
|
请勿修改漂移校正相关工程的内容,同时在后续漂移校正过程中,需确保漂移校正相关工程的名称和工程编号不变。 另外,生成工程的同时,还将在工件库中自动生成标定球点云模板,请勿修改该点云模板的名称和相关配置。 |
启用自校正功能
拍照点验证完成后,要在实际生产过程中校正视觉系统的漂移,还需要完成如下操作:
-
在抓取工程中启用自校正功能。
-
编写机器人自校正程序,实现自动采集标定球位姿,生成漂移校正数据。
编写机器人程序
编写机器人自校正程序是用于自动采集标定球位姿,生成漂移校正数据。编写程序时需用到之前手动记录的机器人法兰位姿。若未记录,可先单击完成按钮,然后单击工具首页底部的查看部署按钮,通过部署结果查看对应拍照点处的法兰位姿。
|
返回工具首页后,你可通过部署向导第四步右侧的 |
你可根据下方的程序流程说明和 FANUC 机器人样例程序及其说明编写自己的机器人自校正程序。机器人自校正程序的基本流程如下。
步骤1:确认机器人坐标系和工具坐标系。
步骤2:移动机器人到 Home 点。
步骤3:移动机器人到预规划的拍照点 1。
步骤4:到达拍照点 1 后,切换标定球位姿采集工程(Drift_Collection_EIH)中的参数配方,即该拍照点对应的参数配方。
步骤5:切换参数配方后,触发“Drift_Collection_EIH”工程运行,在拍照点 1 处采集标定球位姿。
步骤6:对其他层标定球拍照点执行上述 3~5 步骤,在各个拍照点采集标定球位姿。
步骤7:各个拍照点的标定球位姿采集完成后,切换漂移校正数据生成工程(Drift_Calculation)的参数配方。
步骤8:触发“Drift_Calculation”工程运行,生成漂移校正数据。
步骤9:移动机器人到 Home 点。
基于上述流程,以 FANUC 机器人为例,假设标定球拍照点数量为 2,标定球位姿采集工程的工程编号为 2,漂移校正数据生成工程的工程编号为 3,自校正程序及各关键步骤说明如下所示。
UFRAME_NUM=0 ;
UTOOL_NUM=1 ;
J P[1] 100% FINE ;
CALL MM_INIT_SKT('8','192.168.10.22',50000,5) ;
L P[2] 1000mm/sec FINE ;
WAIT 2.00(sec) ;
CALL MM_SET_MOD(2,1) ;
CALL MM_START_VIS(2,0,2,10) ;
WAIT 1.00(sec) ;
L P[3] 1000mm/sec FINE ;
WAIT 2.00(sec) ;
CALL MM_SET_MOD(2,2) ;
CALL MM_START_VIS(2,0,2,10) ;
WAIT 1.00(sec) ;
CALL MM_SET_MOD(3,1) ;
CALL MM_START_VIS(3,0,2,10) ;
J P[1] 100% FINE ;
END ;自校正程序中各关键步骤说明如下表所示。
|
下表仅为关键步骤说明,关于 FANUC 机器人自校正程序各语句的具体解释,可参考FANUC 机器人样例程序。 |
| 流程 | 代码及说明 | ||
|---|---|---|---|
设置坐标系 |
设置机器人坐标系为世界坐标系,工具坐标系为法兰坐标系。 |
||
移动机器人到 Home 点 |
移动机器人到 Home 点,需远离工件和周边设备。
|
||
初始化通信参数 |
设置机器人端口号为 8,将要连接的工控机 IP 地址为 192.168.10.22,工控机与机器人建立通信所使用的端口号为 50000,超时等待时间为 5 分钟。 |
||
移动机器人到标定球拍照点 1 |
机器人以直线移动方式移动至拍照点 1,速度为 1000mm/sec。该拍照点信息可在部署结果中查看。 |
||
切换标定球位姿采集工程的参数配方 |
将标定球位姿采集工程(Drift_Collection_EIH)的参数配方切换成编号为 1 的参数配方。 |
||
触发标定球位姿采集工程运行 |
触发标定球位姿采集工程(Drift_Collection_EIH)运行,在拍照点处采集标定球位姿。 |
||
切换漂移校正数据生成工程的参数配方 |
在所有拍照点处采集标定球位姿后,将漂移校正数据生成工程(Drift_Calculation)的参数配方切换成编号为 1 的参数配方。
|
||
触发漂移校正数据生成工程运行 |
触发漂移校正数据生成工程(Drift_Calculation)运行,基于采集的标定球位姿生成漂移校正数据。 |
||
移动机器人到 Home 点 |
移动机器人到 Home 点,需远离工件和周边设备。 |
示教 HOME 点和拍照点
在机器人程序烧录前,需对 HOME 点和拍照点进行示教,用于确保程序中的点位与实际工位环境一致,避免运行异常或碰撞。
在示教过程中,应根据实际安装情况,对 HOME 点和拍照点进行检查和修正。若发现环境或设备位置发生偏移,应重新示教,以保证后续程序运行的稳定性和安全性。
试运行机器人程序
机器人自校正程序烧录完成后,即可运行机器人自校正程序。运行程序后,机器人将移动到对应的拍照点,触发Mech-Vision工程运行,对标定球进行拍照,采集标定球位姿数据,最终根据生成的漂移校正数据校正漂移。
|
你可根据使用的机器人品牌,在 标准接口通信 章节中参考对应机器人的“标准接口通信配置”文档选择并试运行机器人自校正程序。 |
运行机器人自校正程序后将产生校正记录,可在监测数据看板中查看。
试抓取工件
运行机器人抓取程序,当机器人能够准确抓取工件时,即表示方案部署成功。
需注意,在试抓取完成后,为保证实际生产的长期稳定运行,还需要在监测数据看板中配置漂移量警戒阈值。通常建议设置为10 mm,如漂移校正量超过此阈值,请检查相机和夹具的安装是否稳固,并确认机器人零点是否丢失等问题。
确定自校正周期
根据现场实际情况,按照一定周期(手动或者自动)运行机器人自校正程序,定期采集标定球位姿,用于定期校正视觉系统漂移。
至此,“EIH系统漂移自校正”方案已部署完成,可单击完成按钮,返回工具主界面。
|
部署完成后,建议导出当前相机配置参数组至本地进行备份,以防因相机损坏而更换相机时无法导出相机配置参数组。 |
|
部署完成后,你可单击工具首页底部的查看部署按钮,查看部署结果。部署结果中包含了已部署漂移自校正功能的相机编号、部署结果保存路径、拍照点信息和相机编号信息。 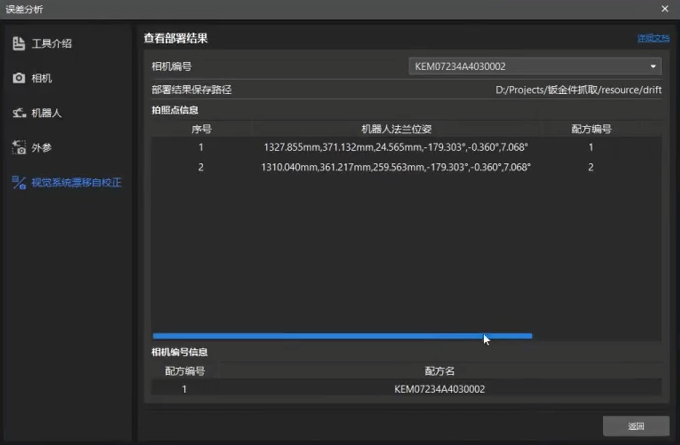
|