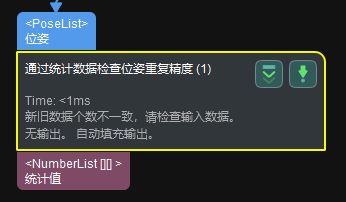
通过统计数据检查位姿重复精度
功能描述
该步骤可验证视觉工程位姿的稳定性。
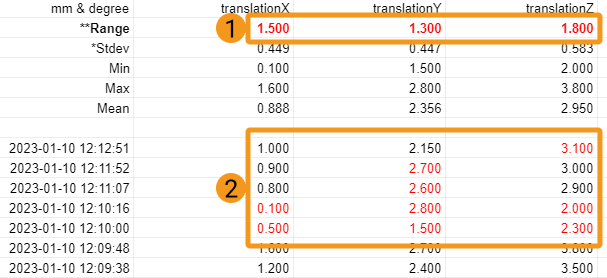
在实际应用中,可通过对同一工件在不同位置进行 10~20 次拍照,来统计该工件在工程中输出的位姿数据(最小值、最大值、均值、范围、标准差),从而判断位姿及其他数据的稳定性。
|
无论相机安装方式是 Eye in Hand 还是 Eye to Hand,都需要对工件在不同位置进行拍照验证工件在不同位置的位姿稳定性,但在同一位置拍 10~20 张照时工件和相机的相对位置是固定不动的。
|
使用场景
该步骤用于检查相机稳定性或验证视觉工程调参有效性。
该步骤可连接于 3D 匹配相关步骤之后,来统计模板匹配得到的的位姿的稳定性。也常连接于 输出 步骤前,使工件位置保持不变,然后令相机采集工件的图像数据,来检验定位的稳定性和识别误差。
运行工程后,该步骤将输出 Excel 格式的“统计数据文件”至指定路径,可在该文件中查看位姿的 X、Y、Z 值和欧拉角 X、Y、Z 值的统计结果。
|
文件中欧拉角的类型为 X→Y→Z。 |
参数说明
待统计数据
| 参数 | 解释 |
|---|---|
输入数据类型 |
参数解释:该参数用于指定输入到该步骤的数据类型,不同的输入数据类型对应的输入端口不同。 值列表:PoseListInput、NumberListInput
默认值:PoseListInput 调节建议:根据实际需求选择输入数据类型。具体效果见 调节示例 。 |
输出数据类型 |
参数解释:该参数表示选择不同输入数据类型后的输出数据类型。 默认值:空间位置与欧拉角统计值。 调节说明:该参数无需调整,保持默认即可。 |
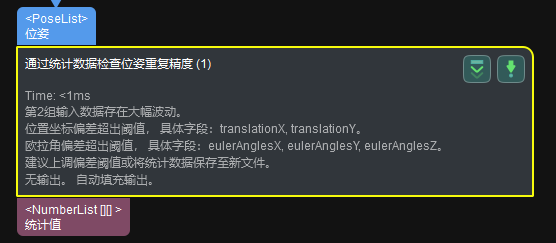
位置坐标偏差范围(0~1000) |
参数解释:该参数用于指定输入位姿的位置坐标偏差上限,单位为毫米(mm)。输入数值后,如果最小值和最大值之间的差超出该阈值,该步骤将按照异常值处理参数的设定报错。此检查过程对 X、Y、Z 值独立进行。 值范围:0~1000 默认值:1.0 mm 调节说明:根据实际需求设置该参数。具体效果见 调节示例 。 |
欧拉角偏差范围(0~360) |
参数解释:该参数用于指定输入位姿的欧拉角坐标偏差上限,单位为度(°)。输入数值后,如果最小值和最大值之间的差超出该阈值,该步骤将按照异常值处理参数的设定报错。此检查过程对 α、β、γ 值独立进行。 值范围:0~360 默认值:0.100° 调节说明:根据实际需求设置该参数。具体效果见 调节示例 。 |
统计数据保存
| 参数 | 解释 | ||
|---|---|---|---|
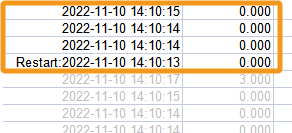
重新开始 |
参数解释:在统计数据过程中,如果出现工件位置发生变化或引入了一组异常数据的情况,该参数用于决定是否重新统计数据。勾选后,会在输出的数据中加入“Restart”标记,“Restart”标记处的时间戳之前的数据将不计入统计范围,且将被置为灰色。 默认值:不勾选。 调节说明:若需重新统计数据,可勾选此项。具体效果见 调节示例 。
|
||
异常值处理 |
参数解释:当统计数据中出现异常值时,该参数用于指定针对异常值的处理方式。 值列表:发现异常值立即报错、记录异常值并标记。
默认值:发现异常值立即报错。 调节说明:根据实际需求设置该参数。具体效果见 调节示例 。 |
||
小数点位数(0~8) |
参数解释:该参数用于设置统计数据的小数点后保留的位数。例如,当该参数设置为“2”后,该步骤使用四舍五入的方式对计算后得到的统计值保留两位小数。 默认值:3 值范围:0~8 调节说明:根据实际需求设置该参数。 |
||
使用正负值表示范围 |
参数解释:勾选后,将在统计数据文件中使用正负值表示范围。例如,勾选前范围为 200,勾选后,范围将表示为 ±100。 默认值:不勾选 调节说明:根据实际需求设置该参数。 |
||
文件基本名 |
参数解释:该参数用于设置保存的统计数据文件的名称。若不设置文件基本名,统计数据文件将以“posesStatistics”命名。若修改了文件基本名,此时将自动勾选重新开始,重新开始统计数据。 默认值:无。 调节说明:根据实际需求设置该参数。
|
||
保存文件夹路径 |
参数解释:该参数用于设置统计数据文件的保存路径。若不设置保存路径,统计数据文件将保存至工程文件夹中。 默认值:无。 调节说明:单击该参数右侧 |