配置 TCP 通信
本节介绍如何配置 TCP 通信。在操作前,请确认已 选择机器人 ,并进入通信配置界面。
-
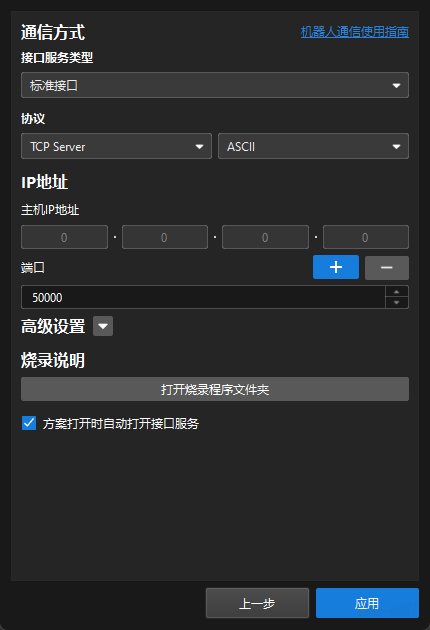
在通信方式下,接口服务类型选择标准接口,协议选择TCP Server,通信协议格式根据下表进行选择。
机器人类型 通信协议格式 ABB
HEX(小端)
FANUC
HEX(大端)
KUKA
HEX(小端)
Yaskawa
ASCII
Kawasaki
ASCII
UR
ASCII
TM
ASCII
ELITE
ASCII
JAKA
ASCII
ROKAE
ASCII
其他
用户需编写机器人端通信程序,因此可根据机器人对 HEX、ASCII 的支持情况,从而决定协议格式
-
在IP 地址下,填写主机端口号。
主机端口号建议设置为 50000 或 50000 以上。
-
(可选)在高级设置下,请根据实际需求进行设置。
-
单次发送位姿的最大数量:在使用“运行Mech-Vision工程”指令时,用户可在此处设置视觉系统单次发送位姿的最大数量。此处最大数量的上限为30。
-
获取Mech-Viz数据超时时间(秒):在使用“运行Mech-Viz工程”指令时,若Mech-Viz在此处设置的超时时间内未返回处理结果,则将返回超时错误状态码。
-
获取Mech-Vision数据超时时间(秒):在使用“运行Mech-Vision工程”指令时,若Mech-Vision在此处设置的超时时间内未返回处理结果,则将返回超时错误状态码。
-
拍照完成再返回“1102:触发成功”:在EIH场景中,如果用户勾选此选项,则视觉系统在相机拍照完成后便返回“1102:触发成功”,这样机器人便可开始移动,而不必等待Mech-Vision工程运行结束,从而缩短节拍。如果用户未勾选此选项,则机器人必须等待Mech-Vision工程运行结束后才可移动。有关该选项的样例,可参考ABB样例程序。
在勾选此选项后,下方会出现等待拍照完成的超时时间。若相机拍照时间较长,则可适当增加此处超时时间。 -
属性配置:单击该按钮,将打开roperty_config.txt文件。在使用“读取Mech-Viz步骤参数值”或“设置Mech-Viz步骤参数值”指令时,用户需通过该文件指定步骤编号或步骤参数。有关该配置的用法,可参考读取Mech-Viz步骤参数值和设置Mech-Viz步骤参数值指令(以ABB机器人为例)。
-
重置:将上述配置项(除属性配置外)重置为默认值。
-
-
(可选)勾选方案打开时自动打开接口服务。下次打开方案时,无需再 启动接口服务 。
-
单击应用。
-
启动接口服务 。
后续根据所选机器人进行 标准接口配置 操作。