配置 TCP 通信
本节介绍如何配置 TCP 通信。在操作前,请确认已 选择机器人 ,并进入通信配置界面。
-
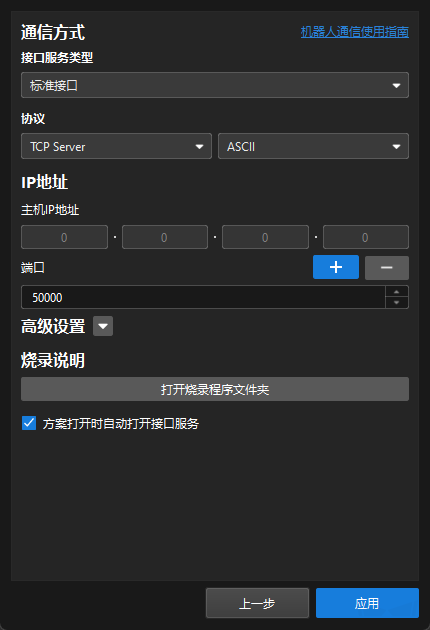
在通信方式下,接口服务类型选择标准接口,协议选择TCP Server,通信协议格式根据下表进行选择。
机器人类型 通信协议格式 ABB
HEX(小端)
FANUC
HEX(大端)
KUKA
HEX(小端)
Yaskawa
ASCII
Kawasaki
ASCII
UR
ASCII
TM
ASCII
ELITE
ASCII
JAKA
ASCII
ROKAE
ASCII
其他
用户需编写机器人端通信程序,因此可根据机器人对 HEX、ASCII 的支持情况,从而决定协议格式
-
在IP 地址下,填写主机端口号。
主机端口号建议设置为 50000 或 50000 以上。
-
(可选)勾选方案打开时自动打开接口服务。下次打开方案时,无需再 启动接口服务 。
-
单击应用。
-
启动接口服务 。
后续根据所选机器人进行如下相应操作。
-
若所选机器人为以下品牌机器人,则参考下表对应文档进行相应操作。
机器人类型 相关文档 ABB
ABB 标准接口配置
FANUC
FANUC 标准接口配置
FANUC CRX
CRX 插件的安装与配置
Kawasaki
Kawasaki 标准接口配置
KUKA
KUKA 标准接口配置
YASKAWA
YASKAWA 标准接口配置
UR
URCap 插件的安装与配置
TM
TM 标准接口配置
LITE
ELITE 标准接口配置
JAKA
JAKA 标准接口配置
-
若所选机器人为除上述以外的其他品牌机器人,则参考 标准接口开发者手册 编写机器人端通信程序。在进行标定时,参考对应机器人的 主控程序烧录 以完成 自动标定 。
-
若所选机器人为其他机器人,则参考 标准接口开发者手册 编写机器人端通信程序。在进行标定时,参考 手动标定 进行相关操作。