位姿调整工具
功能介绍
位姿调整工具可提高位姿调整易用性,增加调整过程中位姿的可视化功能,并降低位姿调整的学习成本。通过完成位姿调整、位姿规则、通用设置三个步骤即可实现位姿调整、位姿排序、位姿过滤以及其他位姿相关设置。

-
位姿调整:可对位姿进行平移和方向调整。
-
位姿规则:可根据实际需求,对位姿进行排序,并且可过滤不满足要求的位姿。
-
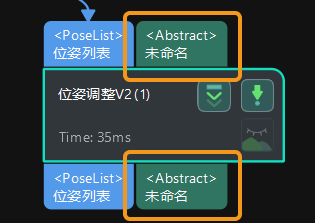
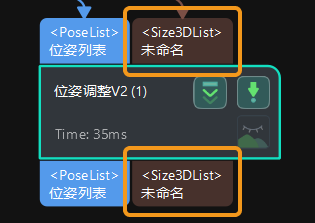
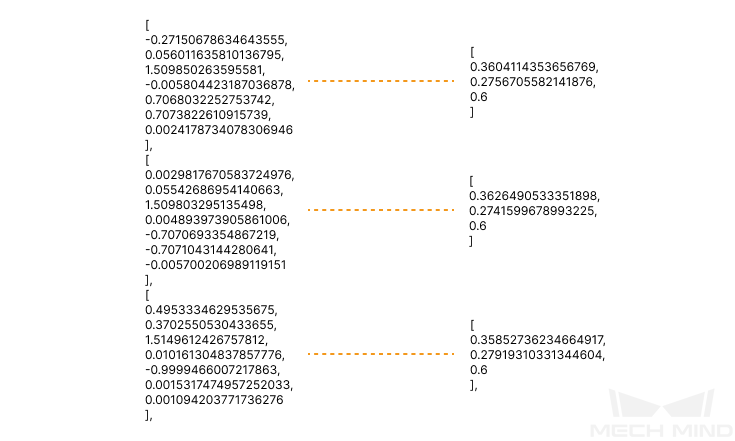
通用设置:可对位姿处理以外的操作进行设置,当前支持对与位姿一一对应的其他数据进行重排序。
|
在位姿调整工具中进行相关操作然后返回工程编辑区后,请勿进行“撤销/重做”操作,建议保存当前工程。 |
使用流程
该工具具体使用流程如下。
位姿调整
位姿调整步骤可对位姿进行平移和方向调整。具体说明如下。
选择位姿处理策略
在对位姿进行方向和位移调整前,需先选择位姿处理策略。如需添加位姿处理策略,可单击右侧+按钮进行添加。
完成全部配置或退出该工具时,单击保存按钮,可将操作内容保存至选择的位姿处理策略。
|
当工程中存在多个“调整位姿V2”步骤,且使用了相同的“位姿处理策略”时,若修改了某一步骤所用的“位姿处理策略”,其他步骤所用的“位姿处理策略”不变。 |
坐标系设置
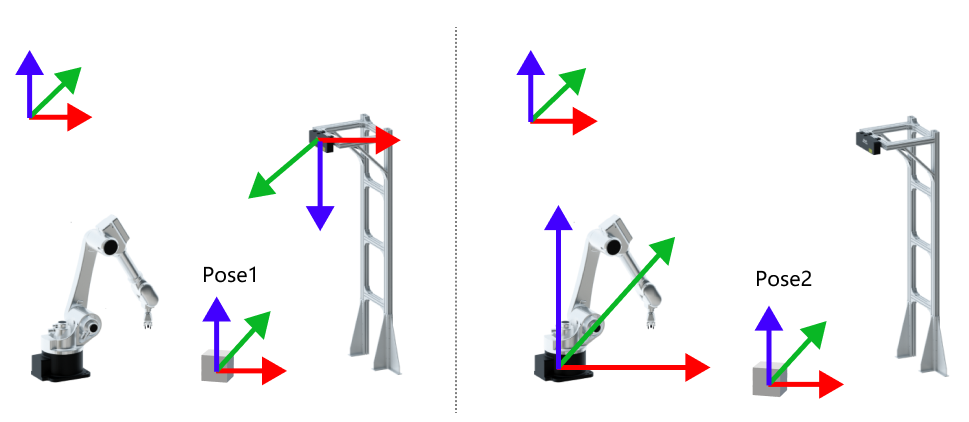
该设置用于选择是否将位姿从相机坐标系转换至机器人坐标系,勾选将位姿转换至机器人坐标系后,即可输出物体在机器人坐标系下的位姿。
如下图所示,左图为相机坐标系下的物体位姿,右图为机器人坐标系下的物体位姿。
位姿调整
此处可对位姿的方向和位移进行调整,分为预设模式(未开启自定义模式时,当前模式为“预设模式”)和自定义模式。
-
当想要根据预置的选项对位姿的方向和位移进行调整时,可保持在默认的预设模式。
-
当需对位姿的方向和位移进行复杂调整时,可开启自定义模式。
预设模式
在预设模式中,可根据提供的预设功能对位姿的方向和位移进行简单调整。
-
方向调整
可根据实际需求选择方向调整项,包括自动对齐、指向参考位姿、指向/指离垛心(拆垛)。具体说明可参考 调整位姿方向(预设模式) 。
-
位移调整
可通过单击右侧+按钮添加位移调整项。仅提供一个位移调整项:沿指定方向移动位姿。具体说明可参考 对位姿进行位移调整(预设模式) 。
位姿规则
此处可根据实际需求,对位姿进行排序,并且可以对不满足要求的位姿进行过滤。
位姿过滤
提供两种位姿过滤方法,分别为角度过滤和过滤感兴趣区域外的位姿。具体说明可参考 根据提供的位姿过滤项对位姿进行过滤 。