配置碰撞检测
配置碰撞检测来检测可能发生的碰撞。软件默认检测机器人、末端工具、场景物体之间的碰撞,开启检查点云碰撞后将检查输入点云与末端工具之间的碰撞。
-
单击工具栏的碰撞设置,并开启检查点云碰撞。
依据项目对碰撞的允许程度设置以下参数。
-
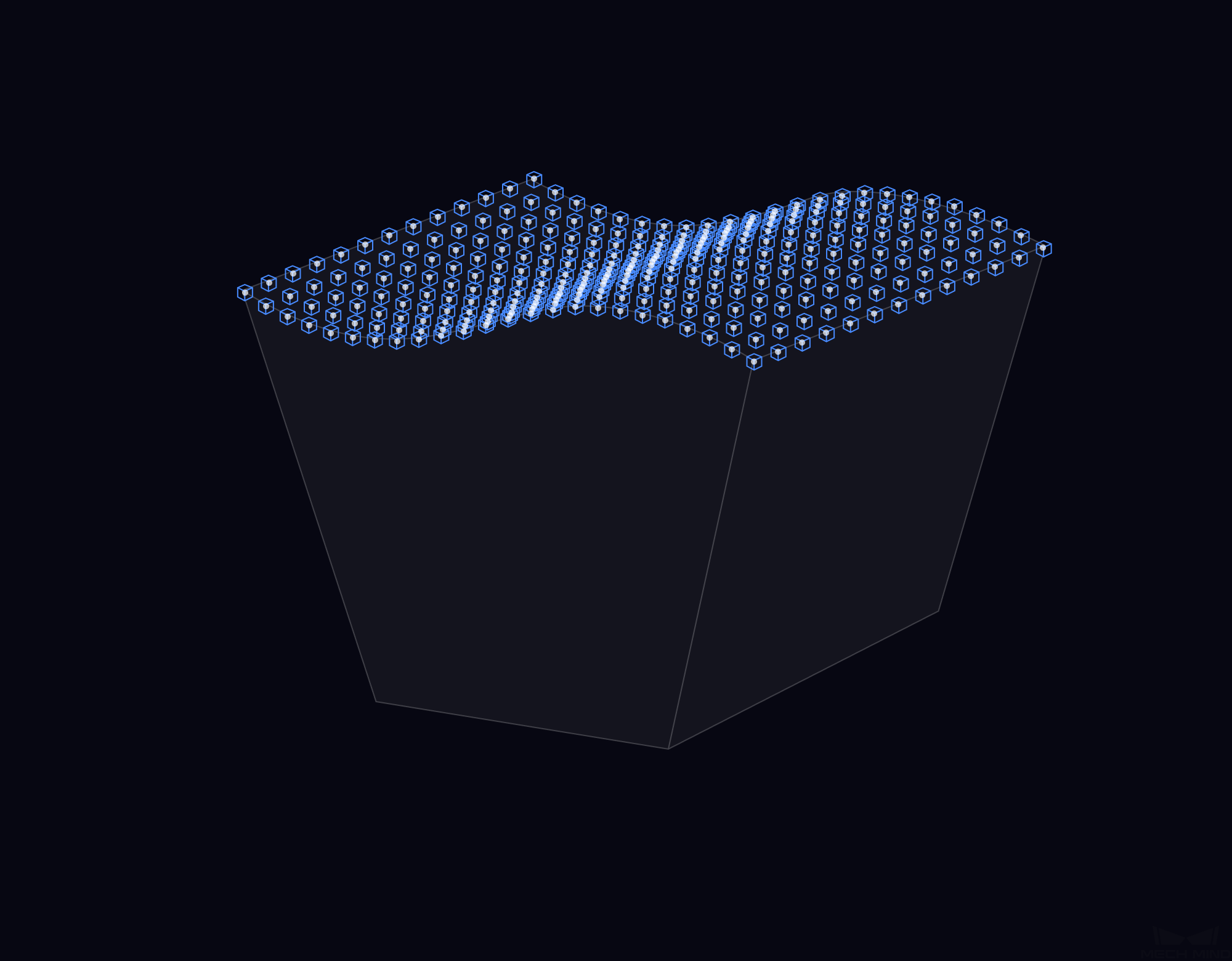
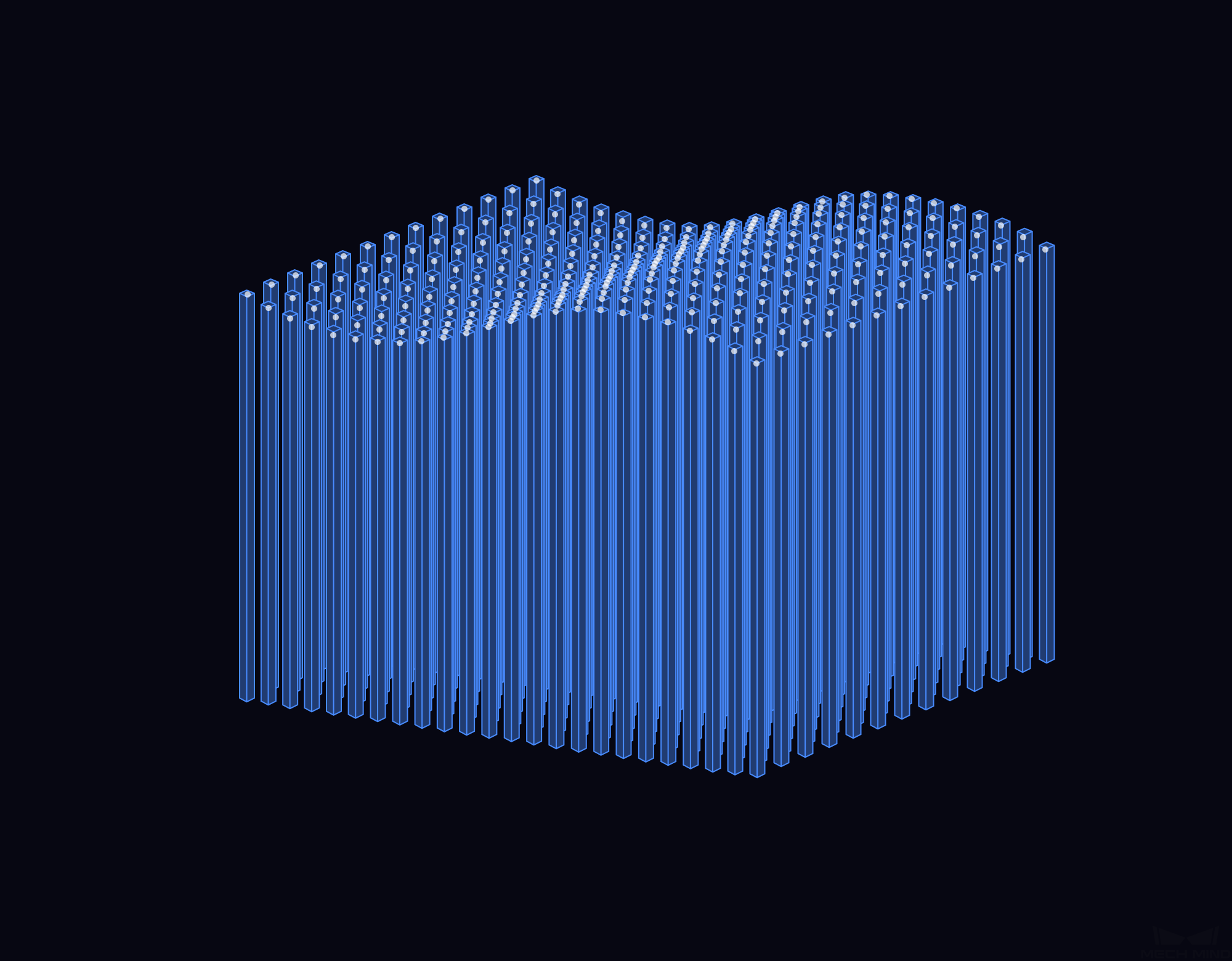
参与碰撞检测的点云形式
点云立方体 点云立柱 使用立方体填充点云表面,以进行碰撞检测计算。
使用立柱填充点云下方的空间,以进行碰撞检测计算。
-
末端工具与点云碰撞体积上限
当末端工具与点云的碰撞体积超过阈值时将判定为发生碰撞,否则判定为未发生碰撞。
-
点云碰撞记录
-
记录:规划历史会记录发生碰撞的点云的位置和数量。用户在查看规划历史时,被记录的点云会在仿真空间中高亮显示。选择记录将降低运行效率。
-
不记录:无法在规划历史中追溯发生碰撞的点云的位置。运行效率比使用记录时更高。
-
-
-
设置完成后,单击确认。