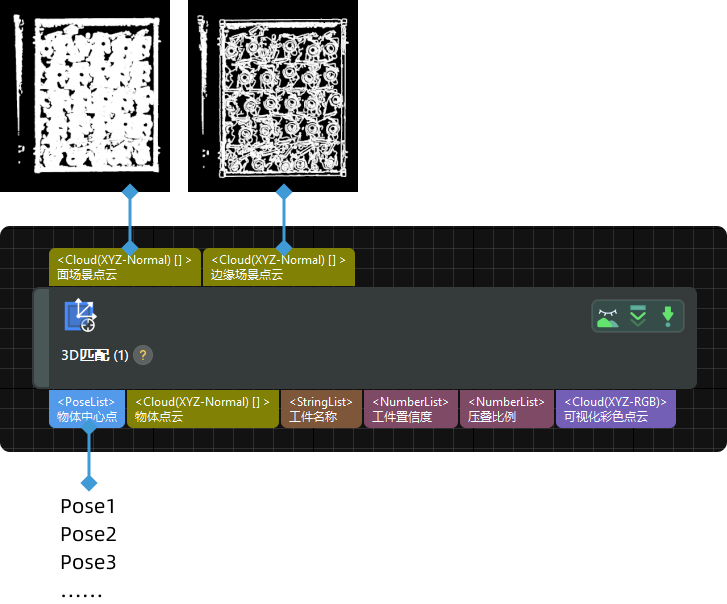
3D匹配
参数说明
模板设置
- 模型选择
-
参数解释:该参数用于选择工件库中的点云模板。
调节说明:单击工件库按钮打开工件库,在工件库中完成点云模板制作后,可在按钮下方的下拉列表中进行选择。
参数调试等级
- 参数调试等级
-
参数解释:该参数用于对参数分级,不同类型用户看到不同的参数。下文将介绍不同调试等级下的参数。
值列表:基础、高级、专家
默认值:基础
单击此处查看基础调试等级中的参数说明
输入输出设置
- 输出类型
-
参数解释:该参数用于设置步骤输出的信息类型,可选择输出抓取点相关信息或物体中心点相关信息。
值列表:抓取点、物体中心点
-
抓取点:输出工件的抓取点和抓取点信息。
-
物体中心点:输出工件的物体中心点。
默认值:抓取点
-
匹配模式
- 自动设置匹配模式
-
参数解释:开启后,步骤将自动设置粗匹配模式和精匹配模式。
默认值:开启
- 粗/精匹配模式
-
参数解释:该参数用于设置匹配的模式。当不勾选自动设置匹配模式时,需设置该参数。
值列表:面匹配、边缘匹配
-
面匹配:利用物体的面点云模板进行点云模板匹配。
-
边缘匹配:利用物体的边缘点云模板进行点云模板匹配。
默认值:面匹配
调节建议:调节该参数时需考虑工件特征和获取的点云质量。当目标物体表面起伏特征较多时(如曲轴、转子等),建议使用面匹配,需制作体现物体表面起伏特征的点云模板。当目标物体较为扁平,且在相机下呈现出清晰、固定的边缘特征时(如面板、履带板、连杆、刹车盘等),建议使用边缘匹配,需制作体现物体边缘特征的点云模板。同时,如果物体点云质量一般,推荐使用面匹配。
-
运行方式
- 运行模式
-
参数解释:该参数用于设定匹配过程的精度及速度之间的权衡。精度越高,耗时越长。
值列表:高速、标准、高精度
默认值:标准
置信度设置
- 结果验证等级
-
参数解释:该参数用于选择验证匹配结果时的程度严格。
值列表:低、标准、高、超高
默认值:标准
调节建议:一般情况下,推荐选择标准。当场景点云和模板点云难以区分时,可选择较高的分数验证等级。
- 置信度阈值
-
参数解释:如果匹配结果的置信度大于此阈值,则认为该结果有效。置信度越高,匹配结果越准确。
默认值:0.3000
调节建议:建议先将该参数设置为默认值并查看运行结果。若出现误识别的情况,建议适当调高该参数;若出现漏识别的情况,建议适当调低该参数。
输出
- 最大输出结果个数
-
参数解释:该参数指定匹配成功的最大输出工件个数。该值越大,步骤运行时间越长。
默认值:10
调节建议:建议适当设置最大结果输出个数,不要将该值设置过高。若修改该参数,将在重新运行步骤后生效,并基于新的匹配结果限制输出结果个数。
| 实际的 3D 匹配识别结果输出个数不一定与设置的最大输出结果个数一致。例如设置的最大输出结果个数为 5,实际一共只有 3 个 3D 匹配识别结果,则最后输出的 3D 匹配识别结果个数为 3。 |
可视化
- 可视化内容
-
参数解释:打开“调试输出”后,选中的选项将被生成并显示在调试输出窗口。
值列表:输出结果、置信度
默认值:输出结果
调节说明:需开启调试输出功能,才可在调试输出窗口中显示位姿。
- 显示位姿
-
参数解释:开启后,将在调试输出窗口中显示位姿。
默认值:开启。
单击此处查看高级调试等级中的参数说明
输入输出设置
- 输出类型
-
参数解释:该参数用于设置步骤输出的信息类型,可选择输出抓取点相关信息或物体中心点相关信息。
值列表:抓取点、物体中心点
-
抓取点:输出工件的抓取点和抓取点信息。
-
物体中心点:输出工件的物体中心点。
默认值:抓取点
-
- 输入类型
-
参数解释:该参数用于设置步骤是否输入模板点云。
值列表:默认、外部模板
-
默认:使用工件库中制作好的点云模板进行匹配。
-
外部模板:选择该选项后,步骤会增加额外输入端口,用于输入工件的点云模板和物体中心点。如需使用该选项,需在工件库中使用“无匹配识别”流程。
默认值:默认
-
匹配模式
- 自动设置匹配模式
-
参数解释:开启后,步骤将自动设置粗匹配模式和精匹配模式。
默认值:开启
- 粗/精匹配模式
-
参数解释:该参数用于设置匹配的模式。当不勾选自动设置匹配模式时,需设置该参数。
值列表:面匹配、边缘匹配
-
面匹配:利用物体的面点云模板进行点云模板匹配。
-
边缘匹配:利用物体的边缘点云模板进行点云模板匹配。
默认值:面匹配
调节建议:调节该参数时需考虑工件特征和获取的点云质量。当目标物体表面起伏特征较多时(如曲轴、转子等),建议使用面匹配,需制作体现物体表面起伏特征的点云模板。当目标物体较为扁平,且在相机下呈现出清晰、固定的边缘特征时(如面板、履带板、连杆、刹车盘等),建议使用边缘匹配,需制作体现物体边缘特征的点云模板。同时,如果物体点云质量一般,推荐使用面匹配。
-
粗匹配设置
- 运行方式
-
参数解释:该参数用于设定匹配过程的精度及速度之间的权衡。精度越高,耗时越长。
值列表:高速、标准、高精度、自定义
默认值:标准
- 期望的模板点云点数
-
参数解释:该参数用于设置期望的模板点云中点的数量。当运行方式为自定义时,需设置该参数。
默认值:300
精匹配设置
- 运行方式
-
参数解释:该参数用于设定匹配过程的精度及速度之间的权衡。精度越高,耗时越长。
值列表:高速、标准、高精度、超高精度、自定义
默认值:标准
- 采样间隔
-
参数解释:该参数值越大,采样后点云中的点数越小,点云越稀疏。因此,匹配精度会降低。而参数值越小,运行时间越长。
默认值:5.000 mm
- 最大迭代次数
-
参数解释:该参数值越大,匹配精度越高,处理速度越慢。
默认值:40
- 标准偏差衰减更新步数
-
参数解释:该参数用于标准偏差微调。
默认值:3
- 偏差矫正能力
-
参数解释:该参数用于选择对粗匹配结果的纠偏能力。能力越大,越能把与实际物体位姿偏离较远的粗略位姿纠正为精确位姿。但如果纠偏能力过大,会导致精度损失。
值列表:小、中、大
默认值:小
额外精匹配
- 使用额外精匹配
-
参数解释:开启后,最终的匹配精度可能会提高,但运行时间会略微增加。请根据实际情况决定是否开启。
默认值:关闭
位姿过滤
- 使用基于位姿距离的非极大值抑制
-
参数解释:开启后,若候选位姿与已选定位姿的距离小于物体直径的 0.1 倍,则该候选位姿将被滤除。
默认值:开启
- 自动设置模板旋转角度上限
-
参数解释:开启后将自动设置模板旋转角度上限。主要用于过滤与工件正反匹配错误的位姿。
默认值:开启
- 模板旋转角度上限
-
参数解释:当模板点云匹配至场景点云时,根据模板绕 X 轴或 Y 轴的旋转角度过滤位姿。当模板旋转角度超过模板旋转角度上限时,该位姿将被过滤。
默认值:135.00°
避免误匹配
- 调整位姿
-
参数解释:选择调整 X 轴朝向后,可以将粗匹配得到的位姿 Z 轴固定,X 轴旋转至指定方向;选择过滤可能匹配失败的位姿后,将使用工件库中计算出的可能匹配失败的位姿辅助匹配,从而避免误匹配。
值列表:无、调整 X 轴朝向、过滤可能匹配失败的位姿
默认值:无
调节说明:如需使用过滤可能匹配失败的位姿参数,需在工件库的点云模板配置中开启配置点云模板功能,然后选择自动计算可能匹配失败的位姿并进行相关设置。
长条物体增强
- 启用长条物体增强
-
参数解释:在匹配长条形工件时,工件和点云容易在工件的长轴方向上错位,两端不能准确对齐。开启该功能后,可以提高长条形工件的匹配精度。
默认值:开启
置信度设置
为保证最上层正常摆放的工件均能被准确识别,需进行置信度设置。
- 结果验证等级
-
参数解释:该参数用于选择验证匹配结果时的程度严格。
值列表:低、标准、高、超高、自定义
默认值:标准
调节建议:一般情况下,推荐选择“标准”。当场景点云和模板点云难以区分时,可选择较高的分数验证等级。
- 搜索半径
-
参数解释:搜索半径越小,匹配结果验证分数越低;搜索半径越大时,匹配结果验证分数越高。当结果验证等级为自定义时,需设置该参数。
默认值:10.000 mm
调节建议:若匹配结果验证分数偏低,可适当调高该参数;若匹配结果验证分数偏高,可适当调低该参数。
- 采样间隔
-
参数解释:设置采样间隔,用于对模板点云和场景点云进行降采样(仅用于验证匹配结果)。该值越大,采样后的点云点数越少。当结果验证等级为自定义时,需设置该参数。
默认值:5.000 mm
- 置信度阈值
-
参数解释:如果匹配结果的置信度大于此阈值,则认为该结果有效。置信度越高,匹配结果越准确。
默认值:0.3000
调节建议:建议先将该参数设置为默认值并查看运行结果。若出现误识别的情况,建议适当调高该参数;若出现漏识别的情况,建议适当调低该参数。
- 面匹配中考虑法向偏差
-
参数解释:在对面匹配结果进行验证时,考虑场景点云和模板点云对应点的法向的角度差异,勾选后,输出的匹配结果个数可能减少,但可提高匹配结果准确性。
默认值:不勾选
去除重叠物体位姿
- 启用去重叠功能
-
参数解释:该参数用于决定是否开启去除重叠物体的功能。
默认值:开启
- 重叠比例阈值
-
参数解释:该参数用于设置物体与另一物体重叠比例的阈值。当两个物体重叠比例超过此值时,将去除位姿置信度低的物体。当开启启用去重叠功能时,需设置该参数。
默认值:30%
去除压叠物体位姿
- 启用去压叠功能
-
参数解释:该参数用于决定是否开启去除压叠物体的功能。
默认值:开启
- 压叠比例阈值
-
参数解释:该参数用于设置物体与其他物体压叠比例的阈值。当压叠比例超过此值时,该物体将被判断为压叠物体。当开启启用去压叠功能时,需设置该参数。
默认值:30%
输出
- 最大输出结果个数
-
参数解释:该参数指定匹配成功的最大输出工件个数。该值越大,步骤运行时间越长。
默认值:10
调节建议:建议适当设置最大结果输出个数,不要将该值设置过高。若修改该参数,将在重新运行步骤后生效,并基于新的匹配结果限制输出结果个数。
| 实际的 3D 匹配识别结果输出个数不一定与设置的最大输出结果个数一致。例如设置的最大输出结果个数为 5,实际一共只有 3 个 3D 匹配识别结果,则最后输出的 3D 匹配识别结果个数为 3。 |
可视化
- 可视化内容
-
参数解释:打开“调试输出”后,选中的选项将被生成并显示在调试输出窗口。
值列表:粗匹配、精匹配、调整 X 轴朝向、置信度、去除被压叠的位姿、输出结果
默认值:输出结果
调节说明:需开启调试输出功能,才可在调试输出窗口中显示位姿。
- 显示位姿
-
参数解释:开启后,将在调试输出窗口中显示位姿。
默认值:开启。
单击此处查看专家调试等级中的参数说明
- 输出类型
-
参数解释:该参数用于设置步骤输出的信息类型,可选择输出抓取点相关信息或物体中心点相关信息。
值列表:抓取点、物体中心点
-
抓取点:输出抓取点相关信息。
-
物体中心点:输出物体中心点相关信息。
默认值:抓取点
-
- 输入类型
-
参数解释:该参数用于设置步骤是否输入模板点云。
值列表:默认、外部模板
-
默认:使用工件库中制作好的点云模板进行匹配。
-
外部模板:选择该选项后,步骤会增加额外输入端口,用于输入工件的点云模板和物体中心点。如需使用该选项,需在工件库中使用“无匹配识别”流程。
默认值:默认
-
点云预处理
- 使用降采样
-
参数解释:开启后,将对点云进行降采样。
默认值:关闭
- 采样间隔
-
参数解释:该参数值越大,采样后点云中的点数越小,点云越稀疏。因此,匹配精度会降低。而参数值越小,运行时间越长。开启使用降采样后,需设置该参数。
默认值:3.000 mm
匹配模式
- 自动设置匹配模式
-
参数解释:开启后,步骤将自动设置粗匹配模式和精匹配模式。
默认值:开启
- 粗/精匹配模式
-
参数解释:该参数用于设置匹配的模式。当不勾选自动设置匹配模式时,需设置该参数。
值列表:面匹配、边缘匹配
-
面匹配:利用物体的面点云模板进行点云模板匹配。
-
边缘匹配:利用物体的边缘点云模板进行点云模板匹配。
默认值:面匹配
调节建议:调节该参数时需考虑工件特征和获取的点云质量。当目标物体表面起伏特征较多时(如曲轴、转子等),建议使用面匹配,需制作体现物体表面起伏特征的点云模板。当目标物体较为扁平,且在相机下呈现出清晰、固定的边缘特征时(如面板、履带板、连杆、刹车盘等),建议使用边缘匹配,需制作体现物体边缘特征的点云模板。同时,如果物体点云质量一般,推荐使用面匹配。
-
粗匹配设置
- 运行方式
-
参数解释:该参数用于设定匹配过程的精度及速度之间的权衡。精度越高,耗时越长。
值列表:高速、标准、高精度、自定义
默认值:标准
- 期望的模板点云点数
-
参数解释:该参数用于设置期望的模板点云中点的数量。当运行方式为自定义时,需设置该参数。
默认值:300
- 自动设置单个点云输出个数
-
参数解释:开启后自动设置单个点云输出结果个数的上限。
默认值:开启
- 采样后的场景点云点数上限
-
参数解释:如果采样后场景点云的点数大于此值,则忽略该点云并输出空数据。
默认值:1000000
投票设置
- 自动设置投票参数
-
参数解释:开启后自动设置“投票设置”参数组下的其他所有参数。
默认值:开启
- 单个特征包含最多点对数量
-
参数解释:模板分析中每个特征包含点对的最大数量。该值越小,运行速度越快,但准确性越低。
默认值:1000
- 距离量化
-
参数解释:量化点间距离的参数(距离间隔=距离量化*采样间隔)。该值越大,匹配结果精度越低。
默认值:2.0000
- 角度量化
-
参数解释:点对特征法向夹角量化(角度间隔=360°/角度量化)。该值越大,匹配结果精度越高,但对点云质量要求也越高。
默认值:30
- 投票比例下限阈值
-
参数解释:匹配过程中,每个物体位姿会获得对应的票数,当位姿票数高于最高得分*投票比例下限阈值时,该位姿将会用于位姿验证。该值越低,找到准确匹配结果的可能性越大,但运行时间越长。
默认值:80%
- 参考点采样步长
-
参数解释:该参数用于对场景点云中的点进行采样,作为参考点,与被参考点形成点对。该值越大,运行速度越快,但匹配结果的准确性越低。
默认值:5
- 被参考点采样步长
-
参数解释:该参数用于对场景点云中的点进行采样,作为被参考点,与参考点形成点对。该值越大,运行速度越快,但匹配结果的准确性越低。
默认值:1
位姿验证设置
- 体素长度生成策略
-
参数解释:选择生成体素长度的方式。
值列表:自动生成、手动设置
默认值:自动生成
调节建议:对于刚开始使用此步骤的用户,推荐选择自动生成。
- 体素长度
-
参数解释:该参数用于设置体素的长度。该值越大,匹配结果越趋向于不准确。
默认值:3.0 mm
- 最小体素长度
-
参数解释:该参数用于设置体素长度的最小值。
默认值:0.100 mm
- 最大体素长度
-
参数解释:该参数用于设置体素长度的最大值。
默认值:15.000 mm
精匹配设置
- 运行方式
-
参数解释:该参数用于设定匹配过程的精度及速度之间的权衡。精度越高,耗时越长。
值列表:高速、标准、高精度、超高精度、自定义
默认值:标准
- 采样间隔
-
参数解释:该参数值越大,采样后点云中的点数越小,点云越稀疏。因此,匹配精度会降低。而参数值越小,运行时间越长。
默认值:5.000 mm
- 最大迭代次数
-
参数解释:该参数值越大,匹配精度越高,处理速度越慢。
默认值:40
- 标准偏差衰减更新步数
-
参数解释:该参数用于标准偏差微调。
默认值:3
- 偏差矫正能力
-
参数解释:该参数用于选择对粗匹配结果的纠偏能力。能力越大,越能把与实际物体位姿偏离较远的粗略位姿纠正为精确位姿。但如果纠偏能力过大,会导致精度损失。
值列表:小、中、大
默认值:小
- 自动设置单个点云输出个数
-
参数解释:开启后自动设置单个点云输出结果个数的上限。
默认值:开启
- 单个点云输出结果个数
-
参数解释:该参数用于设置单个点云输出结果个数的上限,若单个点云有多个匹配结果,则会根据得分对结果进行降序排序,然后根据上限个数截取高分结果输出。关闭自动设置单个点云输出个数时,需设置该参数。
默认值:1
额外精匹配
- 使用额外精匹配
-
参数解释:开启后,最终的匹配精度可能会提高,但运行时间会略微增加。请根据实际情况决定是否开启。
默认值:关闭
位姿过滤
- 使用基于位姿距离的非极大值抑制
-
参数解释:开启后,若候选位姿与已选定位姿的距离小于物体直径的 0.1 倍,则该候选位姿将被滤除。
默认值:开启
- 自动设置模板旋转角度上限
-
参数解释:开启后将自动设置模板旋转角度上限。主要用于过滤与工件正反匹配错误的位姿。
默认值:开启
避免误匹配
- 调整位姿
-
参数解释:选择调整 X 轴朝向后,可以将粗匹配得到的位姿 Z 轴固定,X 轴旋转至指定方向;选择过滤可能匹配失败的位姿后,将使用工件库中计算出的可能匹配失败的位姿辅助匹配,从而避免误匹配。
值列表:无、调整 X 轴朝向、过滤可能匹配失败的位姿
默认值:无
调节说明:如需使用过滤可能匹配失败的位姿参数,需在工件库的点云模板配置中开启配置点云模板功能,然后选择自动计算可能匹配失败的位姿并进行相关设置。
长条物体增强
- 启用长条物体增强
-
参数解释:在匹配长条形工件时,工件和点云容易在工件的长轴方向上错位,两端不能准确对齐。开启该功能后,可以提高长条形工件的匹配精度。
默认值:开启
- 长短边比例阈值
-
参数解释:当工件的长短边比例小于该参数值时,工件将不被识别为长条物体,针对长条物体的增强算法不会生效。
默认值:3.0000
- 步长比例
-
参数解释:该参数用于指定匹配时工件点云平移尝试的步长。步长 = 物体长度 × 步长比例。
默认值:5.00%
- 步数
-
参数解释:该参数用于指定匹配时工件点云平移尝试的步数。工件点云会沿物体长轴的正负方向进行平移尝试,因此,总尝试次数= 2 × 步数。
默认值:5
置信度设置
为保证最上层正常摆放的工件均能被准确识别,需进行置信度设置。
- 结果验证等级
-
参数解释:该参数用于选择验证匹配结果时的程度严格。
值列表:低、标准、高、超高、自定义
默认值:标准
调节建议:一般情况下,推荐选择“标准”。当场景点云和模板点云难以区分时,可选择较高的分数验证等级。
- 搜索半径
-
参数解释:当场景点云和模板点云之间的距离小于该值时,认为场景点云和模板点云重合,重合的点越多,匹配结果验证分数越高。当结果验证等级为自定义时,需设置该参数。
默认值:10.000 mm
- 采样间隔
-
参数解释:设置采样间隔,用于对模板点云和场景点云进行降采样(仅用于验证匹配结果)。该值越大,采样后的点云点数越少。当结果验证等级为自定义时,需设置该参数。
默认值:5.000 mm
- 置信度阈值
-
参数解释:如果匹配结果的置信度大于此阈值,则认为该结果有效。置信度越高,匹配结果越准确。
默认值:0.3000
调节建议:建议先将该参数设置为默认值并查看运行结果。若出现误识别的情况,建议适当调高该参数;若出现漏识别的情况,建议适当调低该参数。
- 面匹配中考虑法向偏差
-
参数解释:在对面匹配结果进行验证时,考虑场景点云和模板点云对应点的法向的角度差异,勾选后,输出的匹配结果个数可能减少,但可提高匹配结果准确性。
默认值:不勾选
去除重叠物体位姿
- 启用去重叠功能
-
参数解释:该参数用于决定是否开启去除重叠物体的功能。
默认值:开启
- 重叠比例阈值
-
参数解释:该参数用于设置物体与另一物体重叠比例的阈值。当两个物体重叠比例超过此值时,将去除位姿置信度低的物体。当开启启用去重叠功能时,需设置该参数。
默认值:30%
- 像素尺寸生成方式
-
参数解释:基于物体点云的 2D 正交投影计算重叠比例时,选择像素尺寸的生成方式,来计算投影后 2D 图像上单位像素的尺寸。
值列表:自动生成、手动设置
-
自动生成:自动生成投影后 2D 图像上单位像素的尺寸。
-
手动设置:手动设置像素尺寸。
默认值:自动生成
-
- 像素尺寸
-
参数解释:基于物体点云的 2D 投影计算重叠比例时,投影后 2D 图像上单位像素的尺寸。建议像素尺寸与制作模板时的采样间隔保持一致。此值过大,可能导致重叠比例计算精度较低;此值过小,可能导致计算得到的重叠比例偏小。当像素尺寸生成方式为手动设置时,需设置该参数。
默认值:2.500 mm
去除压叠物体位姿
- 启用去压叠功能
-
参数解释:该参数用于决定是否开启去除压叠物体的功能。
默认值:开启
- 压叠比例阈值
-
参数解释:该参数用于设置物体与其他物体压叠比例的阈值。当压叠比例超过此值时,该物体将被判断为压叠物体。当开启启用去压叠功能时,需设置该参数。
默认值:30%
- 像素尺寸生成方式
-
参数解释:基于物体点云的 2D 正交投影计算压叠比例时,选择像素尺寸的生成方式,来计算投影后 2D 图像上单位像素的尺寸。
值列表:自动生成、手动设置
-
自动生成:自动生成投影后 2D 图像上单位像素的尺寸。
-
手动设置:手动设置像素尺寸。
默认值:自动生成
-
- 像素尺寸
-
参数解释:基于物体点云的 2D 投影计算压叠比例时,投影后 2D 图像上单位像素的尺寸。建议像素尺寸等于制作模板时的采样间隔。此值过大,压叠比例计算精度较低;此值过小,可能导致计算得到的压叠比例偏小。当像素尺寸生成方式为手动设置时,需设置该参数。
默认值:2.500 mm
- 物体周围场景点移除范围
-
参数解释:该参数范围内,物体周围的场景点云将被移除,剩余的场景点云将参与压叠检测。
默认值:3.000 mm
输出
- 最大输出结果个数
-
参数解释:该参数指定匹配成功的最大输出工件个数。该值越大,步骤运行时间越长。
默认值:10
调节建议:建议适当设置最大结果输出个数,不要将该值设置过高。若修改该参数,将在重新运行步骤后生效,并基于新的匹配结果限制输出结果个数。
| 实际的 3D 匹配识别结果输出个数不一定与设置的最大输出结果个数一致。例如设置的最大输出结果个数为 5,实际一共只有 3 个 3D 匹配识别结果,则最后输出的 3D 匹配识别结果个数为 3。 |
可视化
- 可视化内容
-
参数解释:打开“调试输出”后,选中的选项将被生成并显示在调试输出窗口。
值列表:粗匹配、精匹配、粗匹配位姿验证(需重新运行步骤)、精匹配位姿验证、调整 X 轴朝向、置信度、去除重叠的位姿、去除被压叠的位姿、个数限制、输出结果
默认值:输出结果
调节说明:需开启调试输出功能,才可在调试输出窗口中显示位姿。
- 显示位姿
-
参数解释:开启后,将在调试输出窗口中显示位姿。
默认值:开启。
- 位姿类型
-
参数解释:该参数用于选择可视化界面中显示位姿的类型。当选择自动时,位姿类型会与设定的输出类型一致。
值列表:自动、物体中心点、抓取点
默认值:自动