3D匹配
匹配流程
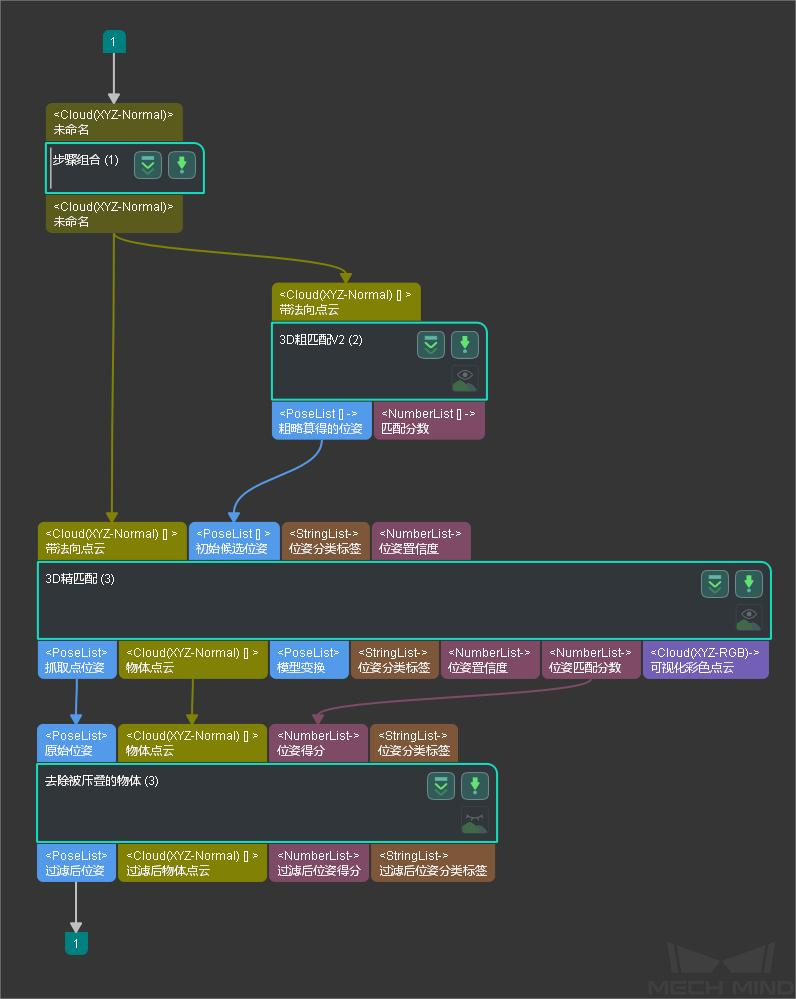
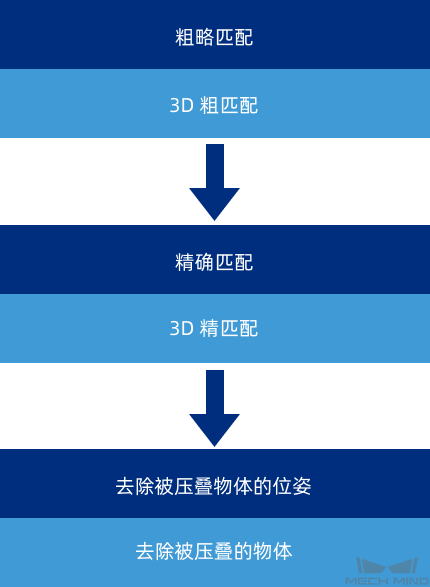
本步骤组合的匹配流程如下图所示:
-
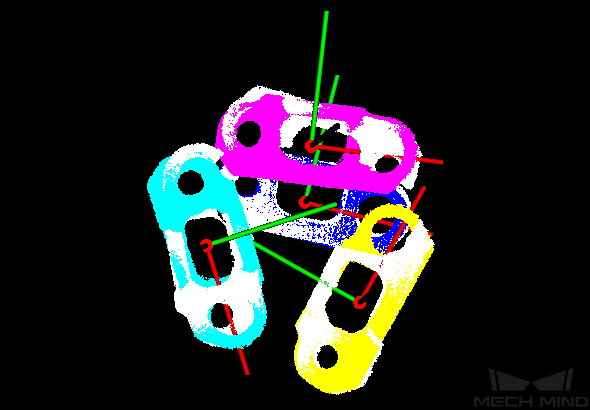
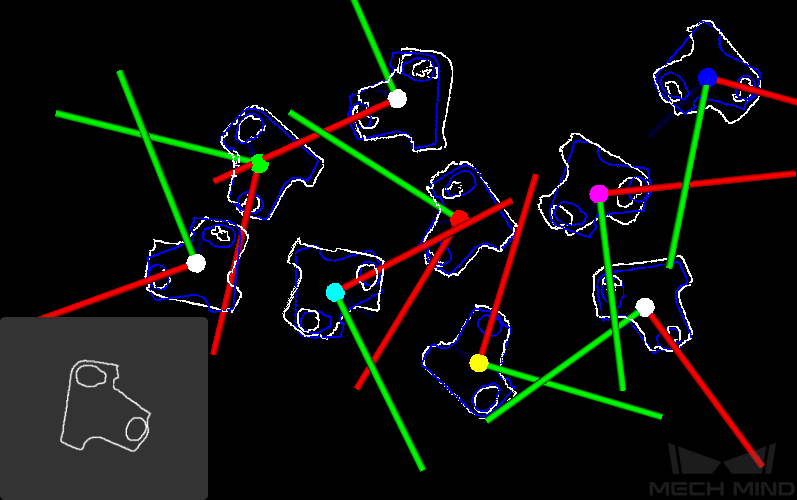
当使用“滤除点数超限的点云”步骤组合获得过滤后的点云后,首先将过滤后的点云输入本步骤组合,通过“3D粗匹配V2”步骤计算被识别物体的初始位姿,如下图所示。初始位姿可能有多个。
-
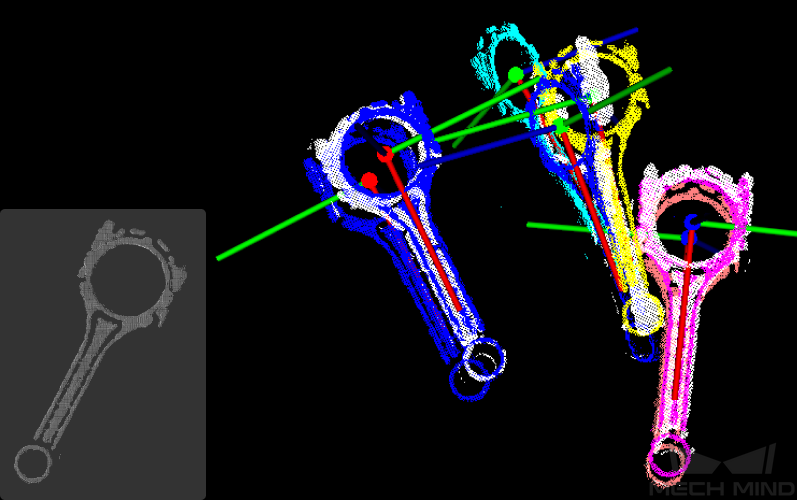
随后“3D精匹配”步骤对初始位姿进行精确匹配,可得到精确的位姿,如下图所示。
-
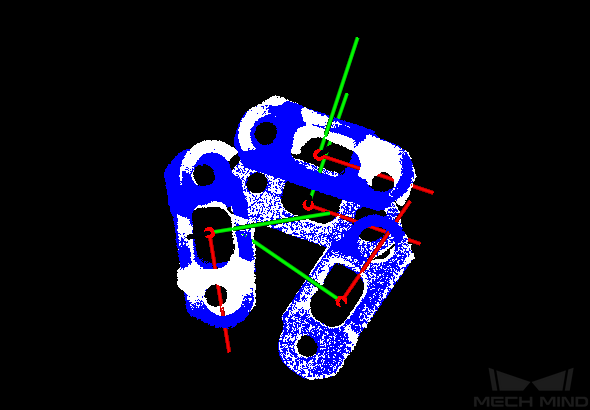
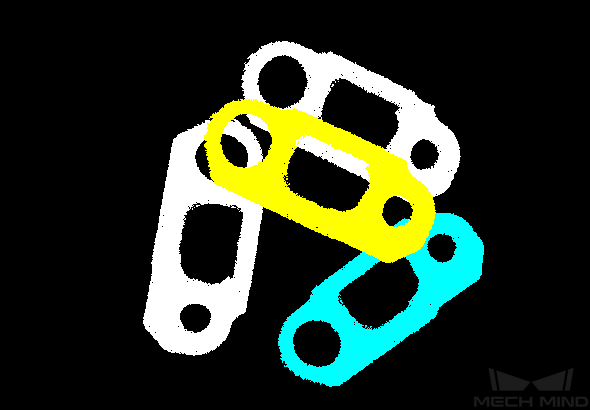
最后在水平方向筛选出被识别物体的位姿后,连接 去除被压叠的物体 ,沿物体 Z 轴方向,去除被压叠的物体,筛选出上层可抓取的位姿。如下图所示,被去除的被压叠的物体点云显示为白色。
参数调节说明
模板设置
- 模板名称
-
默认值:空。
调节说明:运行本步骤组合前,需添加物体的点云模板,通过物体点云模板对场景中的物体进行匹配,识别出场景中的物体并得到其位姿。当使用 匹配模板与抓取点编辑器 制作好点云模板并保存后,可在此处的下拉栏中选择保存好的点云模板。
匹配设置
- 匹配模式
-
默认值:Edge
值列表:Surface(面匹配)、Edge(边缘匹配)。
调节说明:匹配模式分为 Surface(面匹配)和 Edge(边缘匹配)。若使用的模板点云为物体边缘,则选择边缘匹配,如下图所示。
若使用的模板点云为物体的面,则选择面匹配,如下图所示。
- 采样后模型的期望点数
-
默认值:300
调节说明:此参数用于设置降采样后点云模板中点的数量,自动降采样后得到的点数将接近此值。该值越小,采样点云的点数越少,匹配精度越低。
| 参数值 | 300 | 600 |
|---|---|---|
图示 |
|
|
点数 |
276 |
632 |
- 匹配速度
-
默认值:Standard
值列表:HighSpeed、Standard、HighPrecision
调节说明:需根据工程需要选择合适的模式。
-
HighSpeed:速度最快但是精度较低的模式;
-
Standard:一个比较稳定的模式;
-
HighPrecision:精度最高但速度较慢的模式。
-
- 置信度
-
默认值:0.6
调节说明:此参数用于与位姿匹配分数作比较,获取更准确的位姿匹配结果,常与结果评价搜索半径参数连用。如果位姿匹配分数大于此值,则认为该位姿匹配结果有效。在其他参数保持不变的情况下,此值越高,位姿匹配结果越准确。
在实际应用过程中,需先设置合适的结果评价搜索半径(双击进入此步骤组合内,在“3D精匹配”步骤参数中设置该参数),然后再根据实际情况设置置信度。
结果评价搜索半径的取值大小影响着位姿匹配分数。当其值越大时,位姿匹配结果的评价越宽松,即使位姿匹配效果较差,位姿匹配分数也会较高;当其值越小时,位姿匹配结果的评价越严格。需根据该物体点云情况进行设置,如果物体点云稀疏,则需要将结果评价搜索半径设置的稍大一些。
参数调节过程中,可先设置一个初始的结果评价搜索半径值,然后运行步骤,通过可视化窗口观察位姿匹配效果,和位姿匹配分数进行对比,若发现匹配效果与匹配分数不一致,则可根据实际情况调整结果评价搜索半径的值,直至匹配效果与匹配分数相符。
设置好合适的结果评价搜索半径的值后,再根据实际需求设置置信度,以获得位姿匹配分数高于置信度的位姿匹配结果。
结果设置
- 最大输出个数
-
默认值:10
值范围:1~100
调节说明:此参数表示最多能够输出的位姿匹配结果个数。若有多个位姿匹配结果,则会根据位姿匹配分数对位姿匹配结果进行降序排序,然后根据设定的最大输出个数来输出位姿匹配分数高的位姿匹配结果。
实际的位姿匹配结果输出个数不一定与设置的最大输出个数一致。如设置的最大输出个数为 5,实际一共只有 3 个位姿匹配结果,则最后输出的位姿匹配结果个数为 3。