机器人模型制作与导入
机器人模型库中均无所需机器人时,请参考本文内容制作并导入机器人模型,操作步骤如下:
本文以 FANUC M-900iB/400L 为例。
编写 [robot]_algo.json 参数文件
[robot]_algo.json 文件模板
模板文件algo_example.json存放在C:/Users/Administrator/AppData/Roaming/Mmind/robot文件夹中,用户可以此为基础创建新机器人的[robot]_algo.json文件。
| [robot]_algo.json 文件中各个参数的含义请参考[robot]_algo.json 文件参数释义。 |
确认机器人构型(algo_type)
机器人分为很多不同的构型,不同的机器人构型对应不同的坐标系和 DH 参数定义。
机器人构型划分详情请参考机器人构型。
FANUC M-900iB/400L 是一款较为常规的六轴球型腕工业机器人,属于 SphericalWrist_SixAxis 构型。
确认 DH 参数(dh、dhPassive)
参考机器人构型中的机器人分类,找到对应的机器人构型图,对照机器人说明书确定 [robot]_algo.json 中的 dh 的数值。
经过查阅,FANUC M-900iB/400L 的 dh 参数分别为 a=0.940,b=0.410,c=1.120,d=0.250,e=2.180,f=0.300。
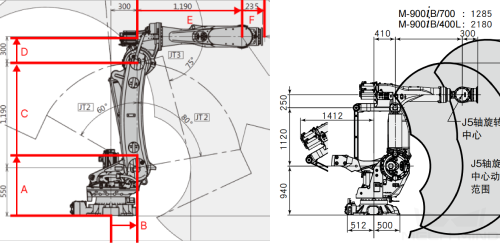
左侧为 SphericalWrist_SixAxis 机器人构型图,右侧为 FANUC M-900iB/400L 机器人尺寸图
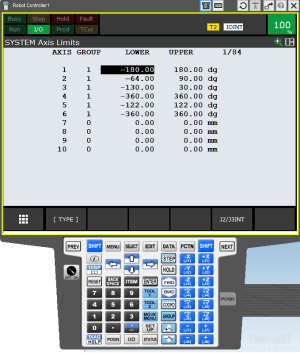
确认机器人各轴限位(minlimits、maxlimits)
通常从机器人说明书可以获知机器人各轴的运动范围,但是 FANUC 机器人比较特殊,需要在 FANUC 的机器人仿真软件 RoboGuide 中查找对应内容。
确认其他参数
对于常见机器人品牌,可以参考其他已添加机器人的历史数据。 若无参考数据,则需要现场工程师对照真实机器人确定剩余参数:mastering_joints、axis_flip、base_z_offset、axis_flip、mastering_joints。
|
编写 [robot]_profile.json 参数文件
模板文件profile_example.json存放在C:/Users/Administrator/AppData/Roaming/Mmind/robot文件夹中,用户可以此为基础创建新机器人的[robot]_profile.json文件。
| [robot]_profile.json 文件中各个参数的含义请参考[robot]_profile.json 文件参数释义。 |
使用 Solidworks 建立完整的机器人 STL 模型
导入模型到 SolidWorks
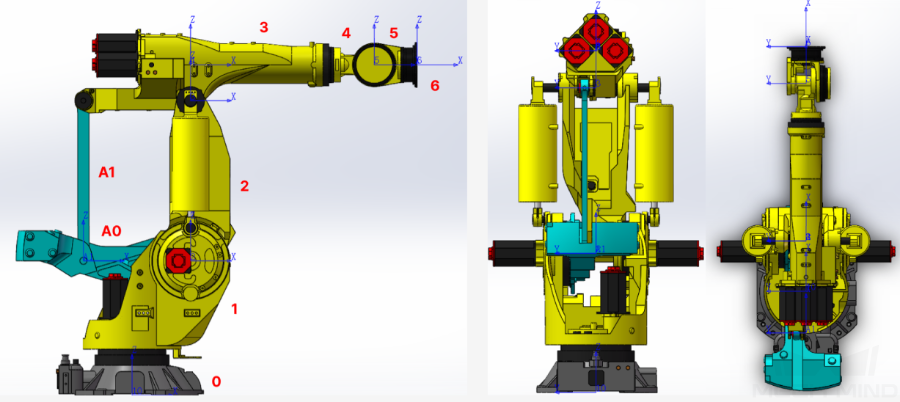
使用 SolidWorks 打开预先准备好的机器人 CAD 模型,如下图所示。
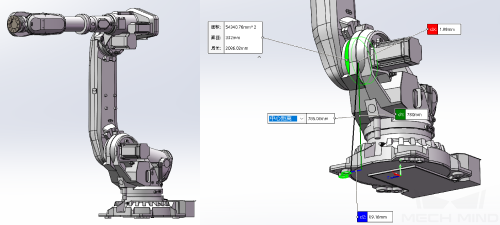
在上图中,左侧为三维软件中显示机器人模型,右侧为装配参考图。
|
建立坐标系
参考机器人构型建立各轴的坐标系。
对于 FANUC M-900iB/400L ,构型为 SphericalWrist_SixAxis,机器人姿态应为:1轴回正,2轴竖直向上,3、4轴水平向前,5轴为向前而非向下。 姿势确保正确后建议先将所有的部件固定。
导出机器人各关节 STL 模型
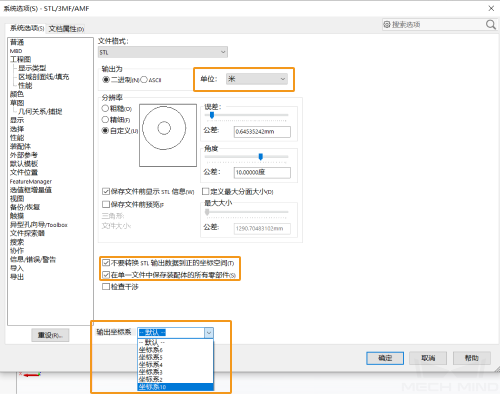
导出机器人模型时,在装配体中隐藏其他零部件的显示,以方便逐个导出。
导出时将文件另存为 stl 文件,输出为二进制,单位为米,文件名命名规则和各部分应选取的坐标系参考机器人构型。 其他导出选项设置请参考下图。
FANUC M-900iB/400L 机器人全部保存完成后的完整 STL 模型文件如下图所示。
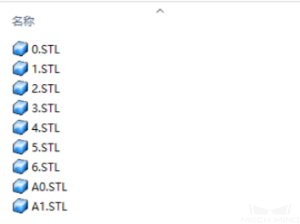
至此,机器人模型制作流程结束。
使用制作的机器人模型
Mech-Viz 软件存放机器人模型的路径为C:\Users\账户名\AppData\Roaming\Mmind\robot文件夹,同一品牌的机器人会存放在同一个以机器人品牌命名的文件夹内,每一个机器人的全部文件都放在品牌文件夹下以机器人型号命名的文件夹内。
|
通过以下任一方式快速打开存放机器人模型的文件夹。
|
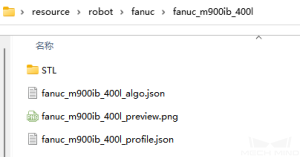
以 FANUC M900iB/280L 机器人为例,对应的模型文件夹为C:\Users\账户名\AppData\Roaming\Mmind\robot\fanuc\fanuc_m_900ib_280l,文件夹结构如下图所示。
|
|
STL |
模型文件 |
fanuc_m_900ib_280l_algo.json |
机器人运动学参数文件 |
fanuc_m_900ib_280l_preview.png |
机器人图片 |
fanuc_m_900ib_280l_profile.json |
机器人描述参数文件 |
|
将所有的文件放在对应的路径下即可完成机器人模型导入。
新导入的机器人可以从机器人模型库中选择。
校验机器人模型参数
在实际部署工程前,需要校验机器人模型参数。如果软件中的仿真机器人位姿、工具位姿与真实机器人位姿存在较大差异,例如1米到2米,则说明机器人模型参数可能不准确,需要进行矫正。
具体操作,请参考机器人模型参数校验教程。