位姿编辑工具
功能简介
位姿编辑工具主要作用是提高位姿调整易用性、增加编辑过程中位姿的可视化功能和降低位姿调整的学习成本。
位姿编辑工具主要有以下两种模式:
-
预设编辑模式: 使用预置的常用功能,如坐标系变换,调整和排序快速地对位姿进行编辑。
-
自定义模式: 添加对应的步骤对位姿进行编辑,可以在工具内浏览编辑后的位姿情况。
界面简介
如下图所示,位姿编辑工具界面主要分成四个区域:

| 界面 | 说明 |
|---|---|
菜单栏 |
用于编辑 IO 端口、设置拖动器类型等。 |
工具栏 |
用于便捷地对位姿进行编辑与调整。 |
场景视角(位姿可视化区域) |
用于浏览编辑完成后的位姿情况,方便后续进一步的调整。 |
编辑区域 |
用于快速便捷地调整位姿、切换编辑模式(根据所选取的编辑模式不同编辑区域也会有所不同)。 |
使用方法
下面以一个工程为例,介绍位姿编辑工具的使用流程:
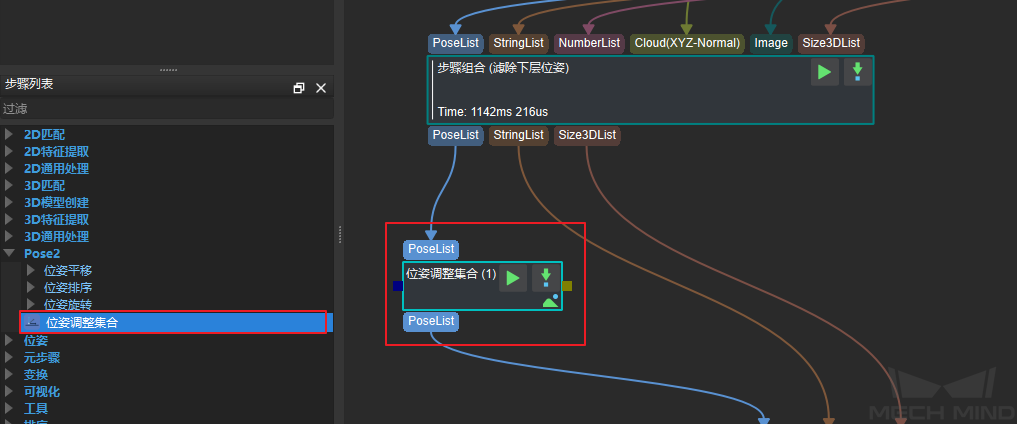
步骤1. 首先在需要对位姿进行编辑的地方,添加打开位姿编辑工具所需要的步骤 调整位姿 ,如下图所示。
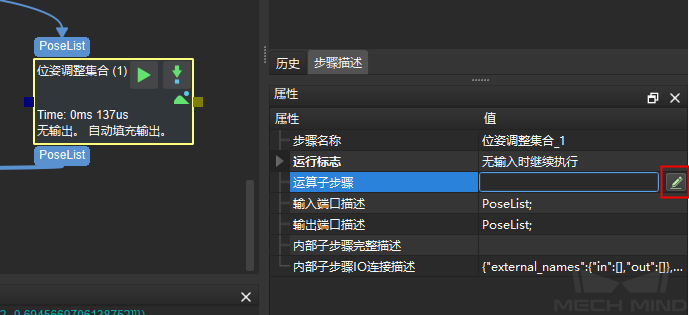
步骤2. 运行工程以获取输入的位姿,再单击步骤参数中运算子步骤输入框内的 ![]() 按钮,进入编辑器,如下图所示。
按钮,进入编辑器,如下图所示。
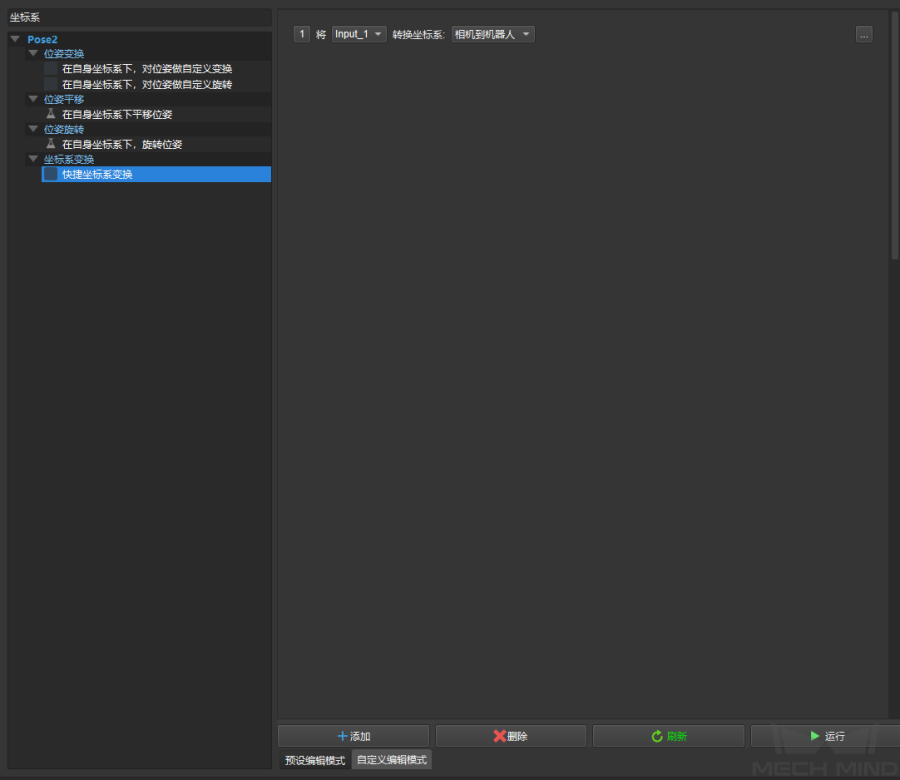
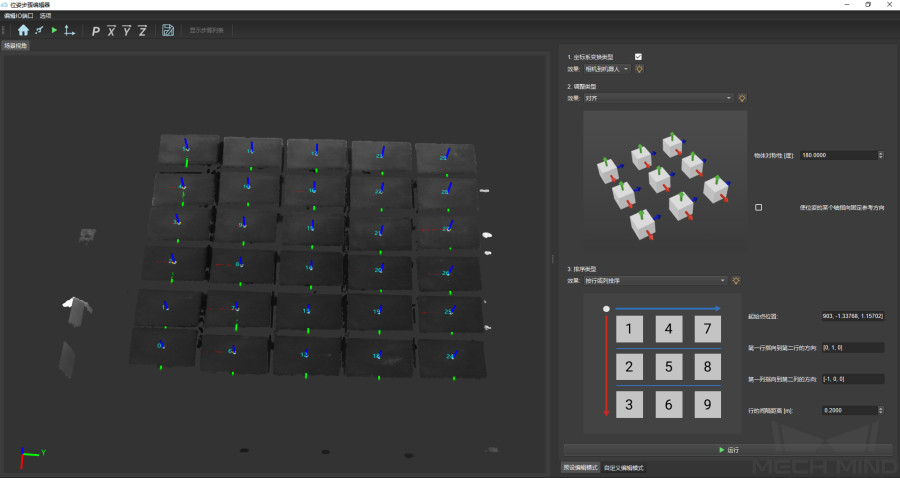
步骤3. 通过使用预设编辑模式,选择需要预设的效果:1.将位姿坐标转到机器人坐标系,2.将位姿方向对齐,3.按行列排序,4.单击运行预览结果。结果如下图所示:
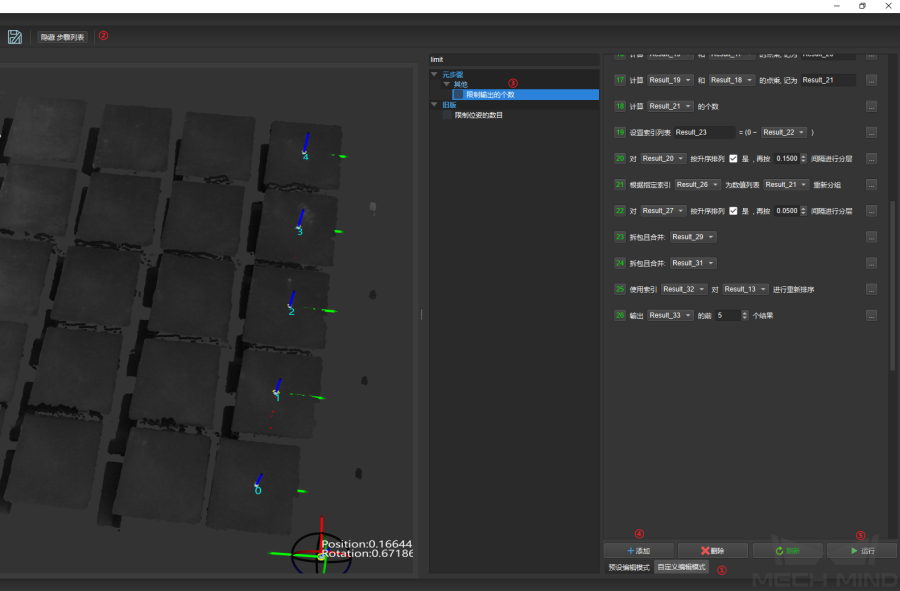
步骤4. 通过使用自定义模式,添加输出数量限制:1.单击自定义编辑模式,2.显示步骤列表,3.选择显示输出的个数,4.单击添加,5.填写限制数量,6.单击运行预览结果。结果如下图所示。
步骤5. 位姿编辑完成后单击退出按钮,如下图所示,保存编辑后的位姿。
步骤6. 运行工程快速浏览工程结果。