基础概念
工程
工程指的是在 Mech-Viz 软件内创建的机器人路径规划项目。
在 Mech-Viz 中完成工程所需的各项配置后,即可通过该工程规划机器人路径并控制机器人移动。工程中的各项配置保存在与工程同名的文件夹中。
位姿
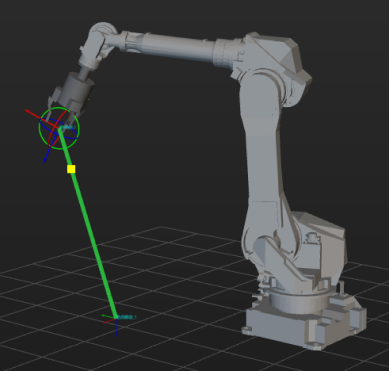
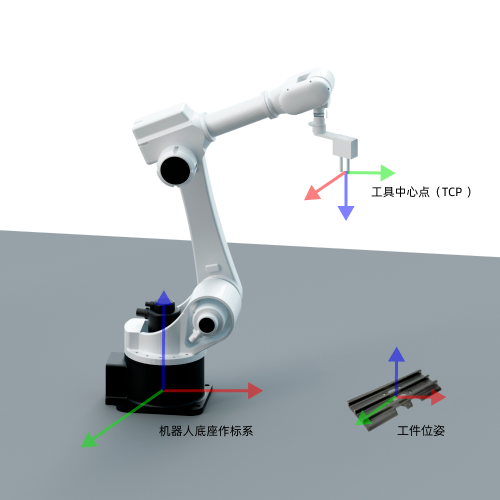
TCP(Tool Center Point, 工具中心点)
位于末端工具上或外部的点,相对于机器人末端法兰的位姿。
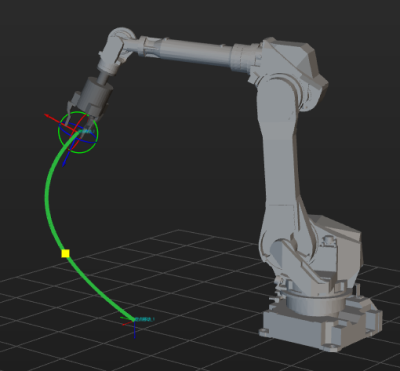
为了完成如工件抓取等任务,当让机器人移动至空间的某一点时,其本质是让工具中心点移动至该点。
(工件)抓取点
一个工件可能有多个不同的抓取点,抓取点由 Mech-Vision 输出。 抓取工件时,机器人会将 TCP 移动到抓取点所在位置,使二者原点、X轴重合,Y轴、Z轴方向相反。
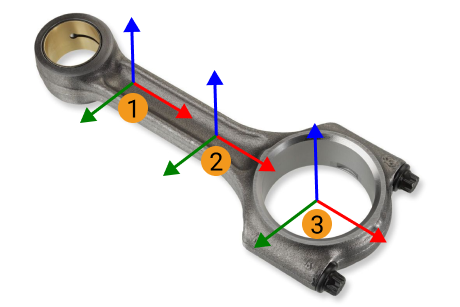
其中:①、②为杆柄抓取点,③为环心抓取点。
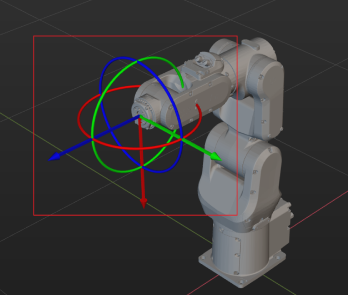
机器人位姿
机器人位姿通常指的是机器人在三维空间中的位置和方向。通常使用工具位姿或关节角表示。
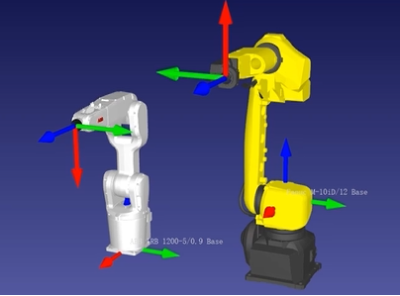
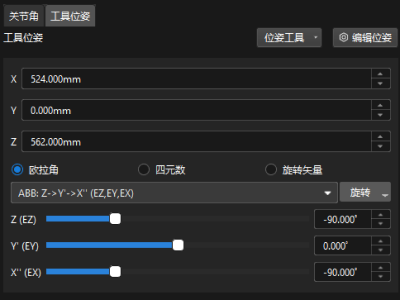
工具位姿
工具位姿是工具坐标系相对于机器人基坐标系的位姿描述。
它包括末端工具的位置(x、y、z)和姿态(通常使用欧拉角、旋转矩阵或四元数表示),这种描述方式更贴近任务空间,侧重于描述机器人执行任务时末端工具(如机械手爪、焊枪等)的位置和朝向。
-
欧拉角
欧拉角(Euler Angles)是一种用于描述物体在三维空间中旋转的方法。
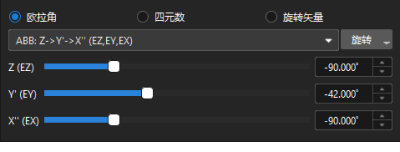
它由三个角度组成,分别对应三个轴的旋转。这三个轴通常是围绕物体固定坐标系中的X、Y和Z轴旋转。 同一空间姿态可以用多种欧拉角表示,欧拉角表示方式不唯一,为了避免歧义,各个品牌机器人通常都会只挑选一致欧拉角定义形式。如:


-
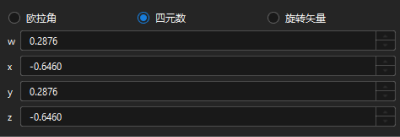
四元数
为了避免使用欧拉角的死锁问题,部分机器人厂家选择使用四元数表示空间中的姿态,四元数大致定义为用三个数定义一个空间旋转轴,用第四个数定义旋转角度,工具坐标系初始状态绕该空间旋转轴旋转该角度后即可达到目标姿态。
-
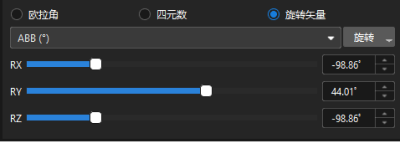
旋转矢量
旋转矢量又称轴角,用于描述末端工具旋转状态。目前已知只有UR使用。