将位姿变换到自定义坐标系
功能描述
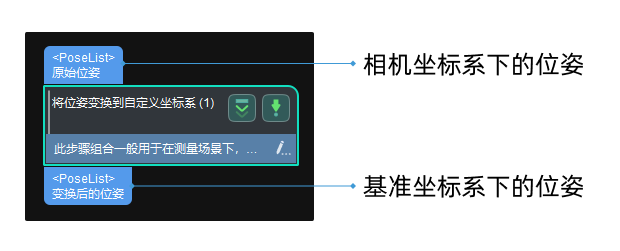
将待测物体的中心点位姿转换到 基准坐标系 ,方便计算。转换过程为:
-
将相机坐标系下的位姿转换到第一个自定义坐标系的位姿。
-
将第一个自定义坐标系下的位姿转换到基准坐标系的位姿。
|
大件测量使用该步骤组合时,通常第一个自定义坐标系为工件坐标系。 |
使用场景
该步骤组合通常用于 大件 测量场景。前接 计算圆孔中心位姿与直径 时,检测圆孔,输出相机坐标系下的圆孔中心位姿;前接 计算腰孔中心位姿与长短轴 时,检测腰孔,输出相机坐标系下的腰孔中心位姿。
将待测物体的中心点位姿转换到 基准坐标系 ,方便计算。转换过程为:
将相机坐标系下的位姿转换到第一个自定义坐标系的位姿。
将第一个自定义坐标系下的位姿转换到基准坐标系的位姿。
|
大件测量使用该步骤组合时,通常第一个自定义坐标系为工件坐标系。 |
该步骤组合通常用于 大件 测量场景。前接 计算圆孔中心位姿与直径 时,检测圆孔,输出相机坐标系下的圆孔中心位姿;前接 计算腰孔中心位姿与长短轴 时,检测腰孔,输出相机坐标系下的腰孔中心位姿。