更新已持有工件
使用场景
获取的物体尺寸或位姿不准确时使用。
为了减少碰撞,需重新获取准确的被抓物体的尺寸和位姿,重新选择碰撞模型,进行碰撞检测,规避碰撞。
-
被抓物体可以为长方体、竖直圆柱或水平圆柱。
-
该功能会打断移动类步骤的规划。
参数说明
非移动步骤基本参数
预规划出口
| 规划:软件尝试找到一条机器人可以在无碰撞的情况下到达目标位置的路径的过程。 |
对于可能中断规划的步骤(如:检查DI),软件无法在规划阶段提前预知此类步骤在实际执行时的出口。 因此可以指定一个预规划出口,使软件沿指定出口后的分支流程进行完整规划。通常会指定实际运行时步骤最有可能走的出口。
修正方式
修正信息来源分为 从参数设置 与 从视觉服务 两种。
从参数设置
没有被抓物体尺寸,或机器人抓取不是视觉引导时使用。通过 更新已持有工件 设定一个被抓物体模型,使其在机器人工具末端生成,用于参与碰撞检查。
| 物体类型 |
长方体、竖直圆柱、水平圆柱或刹车盘。 |
| 工件位姿 |
TCP 坐标系下的位姿,默认不勾选,即不更新已持有工件位姿。勾选后将更新已持有工件位姿,在 位置修正 中填写位姿更新信息。 |
| 物体尺寸 |
被抓物体的尺寸。默认不勾选,即不更新已持有工件尺寸。勾选后将更新已持有工件尺寸, 尺寸修正 中填写尺寸更新信息。 |
| 刹车盘配置文件路径 |
单击 |
应用示例
可以与 分类 和 “混合码垛” 中特定功能配合使用。
与 分类 步骤配合使用,分类 中的 从更新已持有工件获取标签 需勾选为 ![]() 。
。
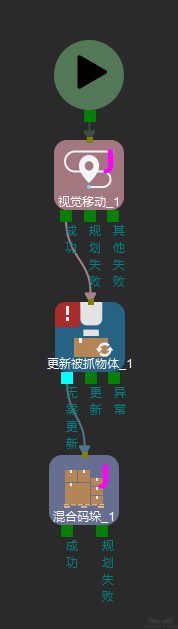
与 混合码垛 步骤配合使用,“混合码垛” 依次选择 ,将 二次拍照更新箱子尺寸 勾选为
![]() 。固定使用如下图所示。
。固定使用如下图所示。