工作流程
步骤库
根据步骤功能软件划分了多个类别,如“基本运动”类别包含与机器人基础移动相关的步骤,如移动、相对移动、按阵列移动等。 单击步骤类别可展开或折叠该类别下的所有步骤。
步骤主要分为“移动”与“非移动”两大类。
-
移动类步骤: 基本运动、码垛、视觉移动
-
非移动类步骤: DI DO、逻辑拓扑、机器人工具、服务、工具、视觉(不包括视觉移动)、其他
在步骤库中可进行以下操作调整步骤的显示。
-
单击鼠标右键,在弹出的菜单中单击展开,将展开所有步骤组。
-
单击鼠标右键,在弹出的菜单中单击折叠,将折叠所有步骤组。
此外,在步骤库上方的搜索框,输入关键字可对步骤进行筛选搜索。
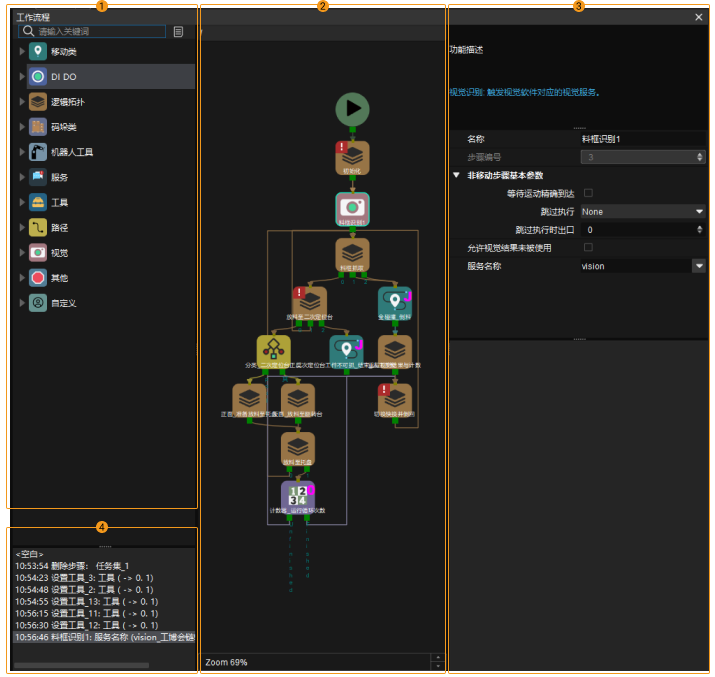
工程编辑区
工程编辑区是用于进行图形化编程的区域。在图形化编程中,你可以从步骤库中拖拽各种步骤,每个步骤代表特定的功能或操作。为了定义程序的逻辑和流程,你需要设置这些步骤的参数并将它们连接在一起。
在工程编辑区中右键单击任意区域,会出现如下选项:
选项 |
说明 |
快捷键 |
导航到上一级 |
切换到步骤组合的上一级。 |
PgUp |
导航到下一级 |
切换到步骤组合中(在步骤组合上右键单击才有效)。 |
PgDown |
拷贝 |
复制选中的步骤。 |
Ctrl + C |
剪切 |
剪切选中的步骤。 |
Ctrl + X |
粘贴 |
粘贴复制的步骤。 |
Ctrl + V |
删除 |
删除选中的步骤。 |
Delete |
全选 |
全选工程编辑区中的所有步骤。 |
Ctrl + A |
保存工程截图 |
保存工程截图到任意位置。 |
无 |
自动排布 |
对当前所有步骤进行自动排布。 |
Alt + Shift + F |
合并步骤组合 |
将选中的多个步骤合并为一个步骤组合。 |
Ctrl + G |
拆分步骤组合 |
将选中的步骤组合拆分。 |
Ctrl + Shift + G |
导入导出步骤组合 |
将选中的步骤组合导出,或导入步骤组合。 |
无 |
自定义描述 |
为选中的步骤添加自定义描述。 |
无 |
重置数字输出信号 |
重置 DO 信号为 0,一般用于关闭吸盘。 |
无 |
在工程编辑区中左键单击任意区域后,按Ctrl+F后将弹出搜索框,可搜索或选择流程图中的步骤。
此外,长按ctrl并滑动鼠标滚轮可进行缩放。
步骤标识
以下表格列举了一些步骤标识以及它们所代表的含义。
| 标识是指出现在步骤图标边角的标记,这些标记可能会根据参数设置和工程运行等情况而发生变化。 |
|
该标识代表当前正在规划的步骤。 规划:软件尝试寻找一条机器人可以无碰撞到达目标位置的路径的过程。 工作流程规划完成后,才实际运行工程。 |

|
该标识代表当前步骤存在警告;鼠标悬浮到警告标识上可查看具体警告信息。 |
|
该标识代表当前步骤存在错误;鼠标悬浮到错误标识上可查看具体错误信息。 |


|
J标识代表当前步骤的运动方式为“关节运动”。 |
|
L标识代表当前步骤的运动方式为“直线运动”。 |


|
该标识代表“检查DI”步骤检查的DI端口号。 |
|
该标识代表“设置分支标记”步骤设置的“标记值”。 |
|
该标识代表退出步骤组合的端口号。 |
|
该标识代表计数器的当前计数。 |



