常见问题与解决办法
非六轴机器人标定
四轴机器人
四轴机器人一般分为桁架机器人、SCARA 机器人以及码垛机器人等。
鉴于使用频率问题,Mech-Viz只针对少量的SCARA和码垛机器人进行了适配(后续会不断添加适配范围)。
-
使用TCP尖点触碰法时尖点固定问题
将尖点固定在四轴上,通过旋转四轴来看尖点是否稳定在一点,来确定尖点是否装在法兰中心位置。 四轴机器人TCP无法通过标定得出,需要手动测量TCP的XYZ值。
-
四轴机器人标定如何调整Z向
当使用标定板多个随机位姿法时,四轴机器人缺少旋转自由度,标定过程中缺少旋转量,在标定完成后,需要手动调整外参Z值。
具体操作方法,请参见四轴机器人的手眼标定的操作手册。
-
桁架机器人使用说明
关于桁架机器人的手眼标定方法,请参考桁架机器人的手眼标定。
当不确定机器人欧拉角选型时如何标定
不确定机器人欧拉角类型时,可以利用相机标定界面“获取欧拉角类型”来获知当前机器人的欧拉角类型。
具体操作如下:
-
打开Mech-Vision软件,在工具栏上单击相机标定(标准)按钮。标定预配置窗口将弹出。
-
在选择如何标定窗口,选择开始新的标定单选框,然后单击下一步按钮。
-
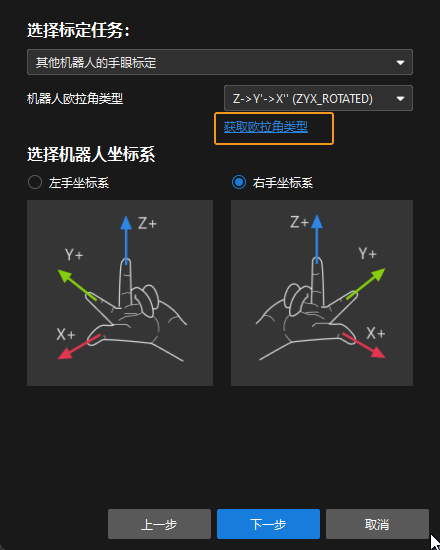
在选择标定任务窗口,从下拉列表框中选择其他机器人的手眼标定,然后单击获取欧拉角类型链接打开工具。
-
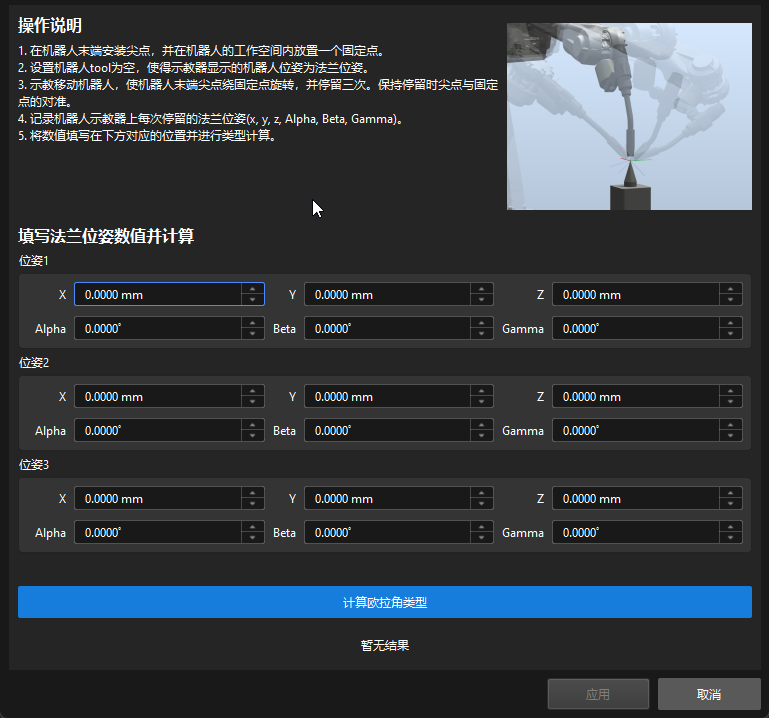
按照工具的操作说明记录三个机器人法兰位姿并输入,然后点击计算欧拉角类型得到机器人的欧拉角类型。
如果现场工作台没有合适的固定尖点,只有已知TCP的机器人末端尖点如何标定
由于无法获取机器人的准确欧拉角类型,所以在使用 TCP 尖点触碰的方式进行标定时,存在欧拉角没法按准确类型输入的现象。
此时可以将机器人示教器上的位姿切换到 TCP,即读取的是尖点的位姿。
依次戳三个点,读取示教器上的 XYZ 三个值,对应输入。欧拉角类型任意选取一个,输入任意恒定值,确保三次输入位姿的欧拉角一致即可。
远距离标定时大量标定点点云波动超差,调整相机参数无改善处理办法
需要检查标定板的状态,看其是否都是十字交叉,如果存在十字交叉,其可能导致点云波动较大,如下图所示:
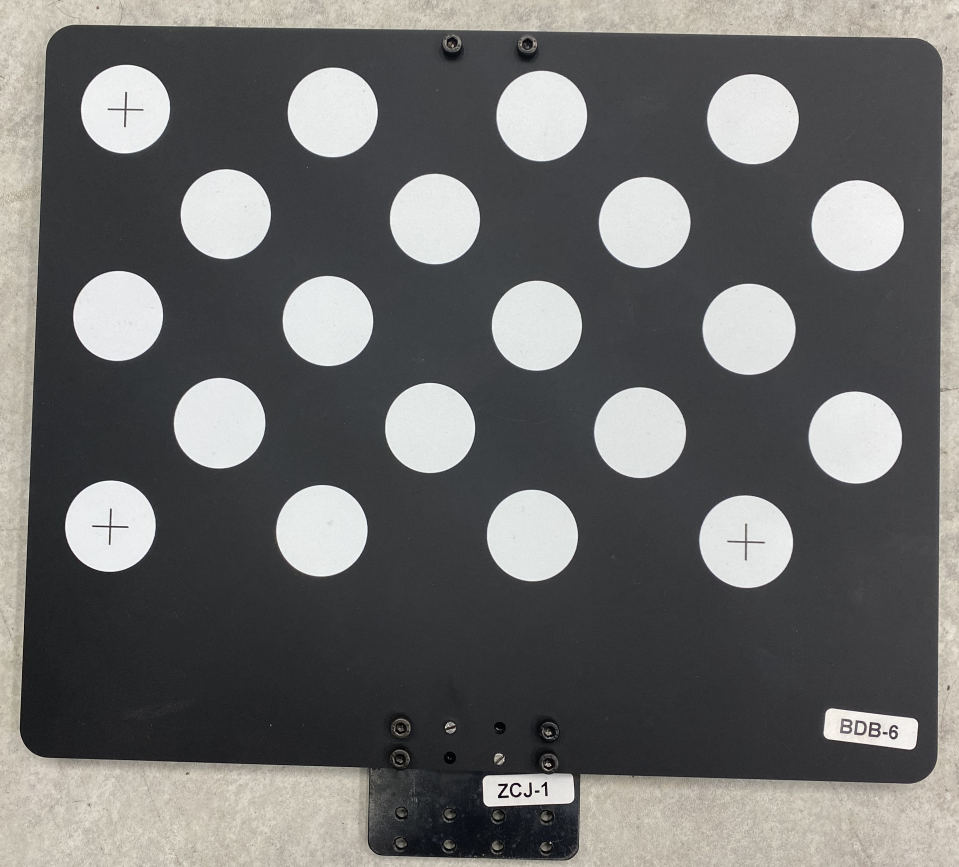
可以将A4纸裁剪后将圆点圆心贴上(注意只贴圆心,不贴圆边缘)。可以降低十字交叉导致的点云波动影响。
如果上述方法仍旧没有改善点云波动大的问题,可以试着手动多添加一些pose,然后删除点云波动大的pose。
标定路径常见误区
-
标定点数量是否越多越好
标定点数量过多,可能引入异常点,导致整体误差比例增大。
当使用出厂矫正参数计算时,根据相机焦距、标定板大小等确定每层的点数:
-
焦距300-2000 mm时,推荐使用2*2,每层四个标定点,层数一般采用三层,垛型较高时四层即可。
-
焦距2000-3500 mm时,推荐使用3*3,每层九个标定点,层数一般采用三层,垛型较高时四到五层即可。
-
标定范围是否一定要包含所有工作区域
使用出厂矫正参数时,应当按照相机焦距为中心位置,在焦距范围上下,分层标定。
未使用出厂矫正参数,或者条件不允许,无法在相机焦距范围上下标定时,建议标全工作区域。
-
标定过的区域外参是准的,但未标到的区域外参是否就不准
标定之后生成的误差点云,其显示的是已标定位置的外参误差,不代表未标到的区域外参就一定不准,相反,在使用出厂矫正参数的时候,基本保证未标到区域的外参也是准的。