常见问题与解决办法
如何对七轴机器人标定
|
此处,七轴机器人不包括六轴带滑轨机器人。 |
对于七轴机器人,优先推荐使用 TCP 尖点触碰法进行标定。
如果现场没有合适的尖点或尖点无法固定,可使用标定板多个随机位姿法进行标定。在标定过程中,需要限制其中一个轴的运动,将七轴机器人理想化为六轴机器人,其余操作和六轴机器人标定基本一致。
当不确定机器人欧拉角选型时如何标定
不确定机器人欧拉角类型时,可以利用相机标定界面“获取欧拉角类型”来获知当前机器人的欧拉角类型。具体操作如下:
-
打开Mech-Vision软件,在工具栏上单击相机标定按钮。标定预配置窗口将弹出。
-
在选择如何标定窗口,选择开始新的标定单选框,然后单击下一步按钮。
-
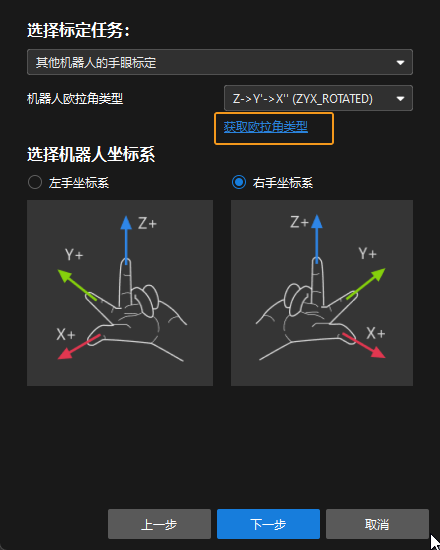
在选择标定任务窗口,从下拉列表框中选择其他机器人的手眼标定,然后单击获取欧拉角类型链接打开工具。
-
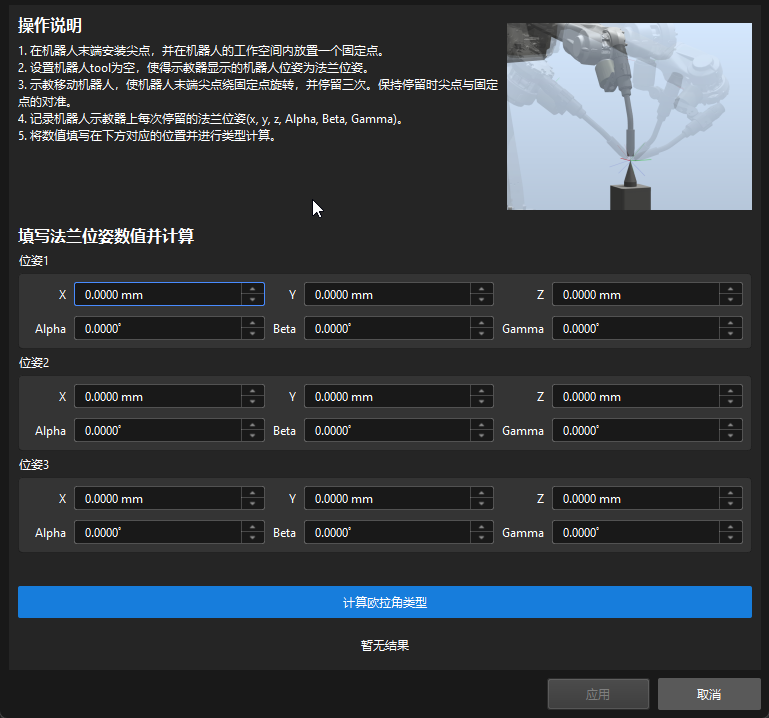
按照工具的操作说明记录三个机器人法兰位姿并输入,然后单击计算欧拉角类型得到机器人的欧拉角类型。