Online
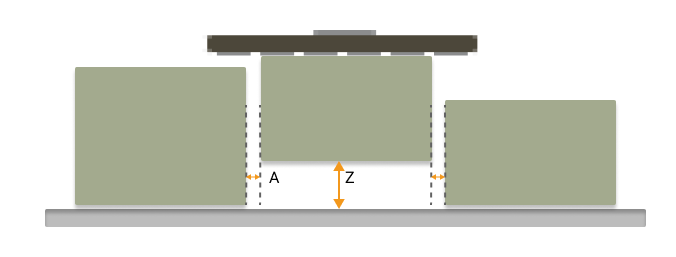
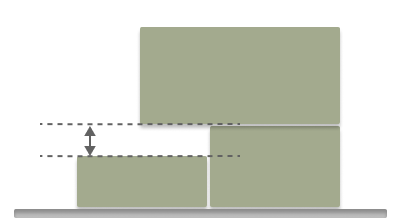
以落体方式放置
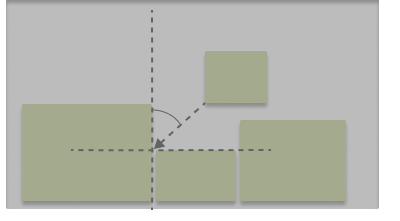
寻找候选位置参数
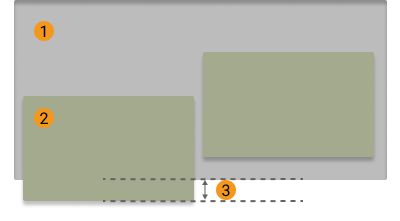
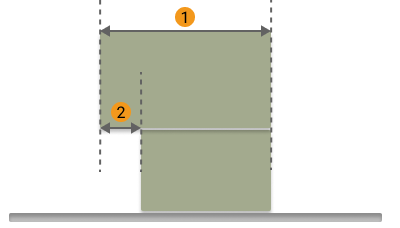
根据加载信息继续码垛
此组参数用于在未完成的垛上继续码垛。
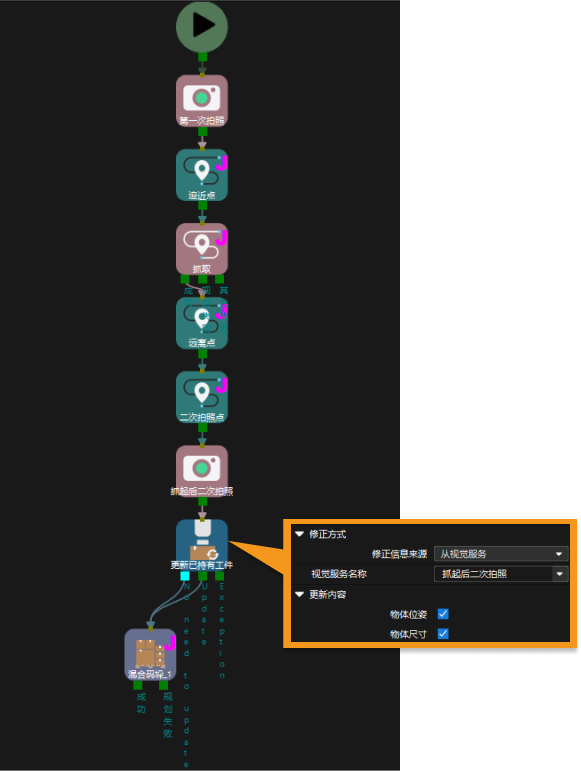
续码信息来源可通过两种选项进行选择:视觉服务或垛型文件。当选择视觉服务时,需要指定用于识别垛型的Mech-Vision工程;而当选择垛型文件时,需要指定已码垛型的JSON文件。
此组参数用于在未完成的垛上继续码垛。
续码信息来源可通过两种选项进行选择:视觉服务或垛型文件。当选择视觉服务时,需要指定用于识别垛型的Mech-Vision工程;而当选择垛型文件时,需要指定已码垛型的JSON文件。