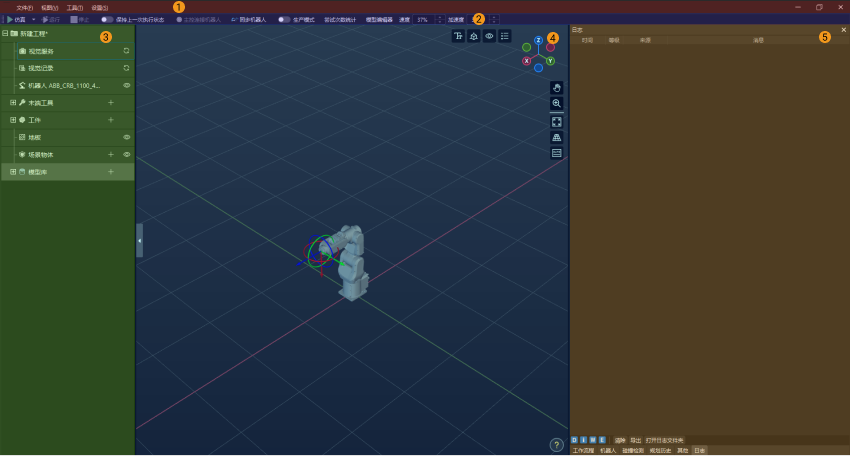
用户界面
文件页
启动 Mech-Viz 后进入文件页。
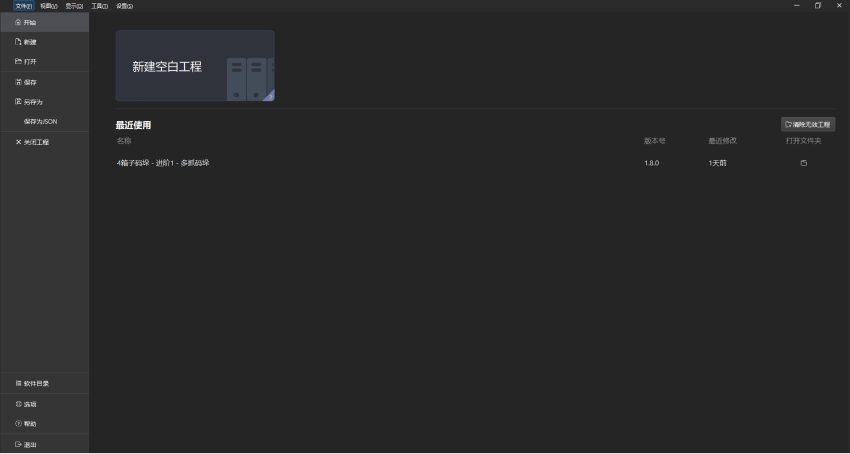
该界面包含以下部分:
选项 |
描述 |
快捷键 |
|
开始 |
创建一个新的空白工程。 |
Ctrl + N |
|
打开最近使用的工程 |
打开最近使用过的工程。 |
无 |
|
新建 |
创建一个新的空白工程。 |
Ctrl + N |
|
样例工程 |
软件内置的样例工程,使用方法请见样例工程。 |
无 |
|
打开 |
选择并打开已有的工程文件夹。 |
Ctrl + O |
|
保存 |
保存对当前工程的改动。 |
Ctrl + S |
|
另存为 |
将工程内容保存到指定位置。 |
Ctrl + Shift + S |
|
保存为JSON |
保存工程,并将工程文件夹中的 .viz 文件保存为 .json 文件。 |
无 |
|
导出到方案 |
将当前工程导出到方案。详细信息请参阅工程与方案。 |
无 |
|
关闭方案 |
关闭当前方案。 |
Ctrl + W |
|
软件目录 |
打开软件安装目录。 |
无 |
|
选项 |
打开选项设置窗口。 |
无 |
|
帮助 |
查看软件支持、版本信息、更新说明、用户手册。 |
无 |
|
退出 |
关闭 Mech-Viz。 |
Ctrl + Q |
|
|