机器人DH参数检查
当机器人与视觉系统之间通过关节角发送位姿数据时,机器人DH参数的正确性将影响机器人精度。本节将介绍机器人DH参数,以及如何检查机器人DH参数。
DH参数简介
机器人DH参数用于描述机器人关节和连杆特征。这些参数可以帮助我们了解机器人的几何和动力学特性,从而更好地控制机器人运动。
通过DH参数,还可以了解机器人的形状和尺寸,并确定机器人在不同关节角度下的位置和姿态。
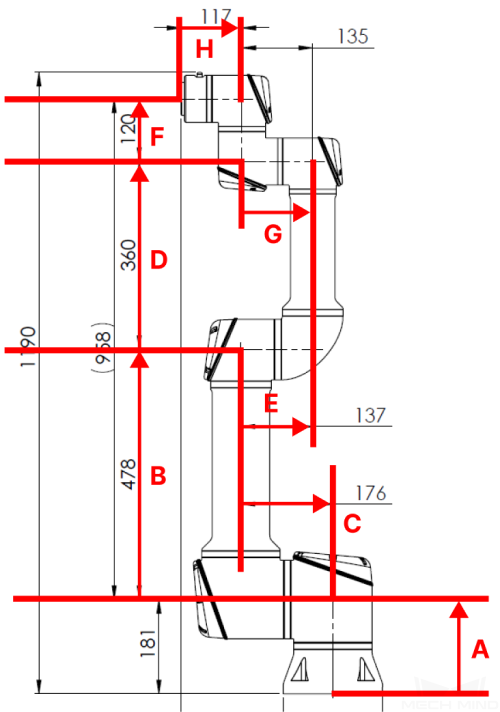
以六轴协作机器人(类似于UR5)为例,其DH参数如下图所示。
DH参数检查
当机器人与视觉系统之间通过关节角发送位姿数据时,如果真实机器人DH参数与仿真用的机器人DH参数不一致,会引入机器人精度误差,此时需进行机器人DH参数检查。检查步骤如下:
-
查询机器人操作手册,查看真实机器人的DH参数。
-
查询机器人模型库,查看仿真机器人的DH参数。
-
对比真实机器人和仿真机器人的DH参数。若DH参数不一致,需修改[robot]_algo.json文件。
具体操作可参考机器人模型参数校验教程。