按阵列移动
参数说明
移动步骤基本参数
发送路径点
默认勾选,即向接收者(如:机器人)发送当前路径点。取消勾选后,将不发送当前路径点,但此路径点仍在规划的路径之中。
尝试平滑通过其后的非移动类步骤
勾选后,不需要等待当前移动步骤运行结束就可以继续往下执行,以此规避机器人停顿的问题,保证机器人运行动作流畅,但可能会导致步骤提前结束。
为何会导致步骤提前结束?
Mech-Viz软件运行时会同时发给机器人多个路径点,软件只判断发送给机器人的最后一个路径点是否与机器人当前返回的关节角相同,如果相同则认为机器人已经移动到最后一个路径点。
例如,一段路径由10个移动步骤组成,其中第5个移动步骤与最后一个移动步骤对应的位姿相同。当机器人运行速度较慢时,移动到第5个路径点后会将当前关节角发送给Mech-Viz。由于第5个移动步骤与最后一个移动步骤的位姿相同,Mech-Viz软件可能误判机器人已到达所有路径点,导致指令提前结束。
不检查与已放置工件的碰撞
在碰撞检测面板中开启工件碰撞检测后,如果勾选此选项,将不再检测机器人、末端工具与已经放置的工件之间的碰撞。在抓放设置为放的步骤的后一个移动步骤中,通常勾选该参数以避免碰撞误检测。
应用示例:
吸盘的TCP通常不设置在吸盘表面,而是在模型内部。这样在抓取箱子时,吸盘模型会与箱子模型发生嵌套。不过,软件不会检测末端工具与已抓取工件的碰撞,因此抓取时不会触发碰撞报警。当机器人放下箱子后,被抓取的箱子模型变为场景模型,此时软件会检测到末端工具与箱子的场景模型发生碰撞,并发出碰撞报警,导致无法完成码垛任务。
勾选此参数后,软件不再检测机器人、末端工具与已经放置的工件模型之间的碰撞,从而解决上述问题。
点云碰撞检查模式
一般选择自动模式,即直接应用碰撞检测面板中点云碰撞检测的设置。对于机器人抓取后至放置前的所有移动步骤,一般可选择检查模式。
自动 |
默认值。当开启碰撞检测面板中的点云碰撞检测时,仅检测“视觉移动”步骤及依赖于“视觉移动”步骤的“相对移动”步骤的点云碰撞,不检测其他的移动类步骤。 |
不检查 |
不检测所有移动步骤的点云碰撞。 |
检查 |
检测所有移动步骤的点云碰撞。 |
忽略工件对称性
该参数仅在移动步骤的目标类型为工件位姿时可见。
此处的工件对称性为在工件库中设置碰撞模型时预先配置的已持有工件旋转对称。
无 |
默认值,不忽略任何对称性设置。 |
绕工件坐标系Z轴 |
仅忽略绕Z轴的对称性。 |
绕工件坐标系X和Y轴 |
仅忽略绕X轴和绕Y轴对称性。 |
绕所有轴 |
忽略所有对称性,机器人将严格按照工件位姿放置工件。 |
| 当移动步骤用于放置工件时,应用旋转对称后无法保证工件放置位姿的一致性。如果希望所有工件严格按照某一规则放置,请忽略绕所有轴的工件对称性。 |
规划失败出口
勾选此参数后,步骤将增加规划失败出口。
若当前步骤的路径规划成功,工作流程沿成功出口继续执行。若当前步骤的路径规划失败,工作流程沿规划失败出口继续执行。若同一条规划历史条目中包含多个存在规划失败出口的移动类步骤,工程沿第一个移动类步骤的规划失败出口继续执行。
已持有工件碰撞检测设置
配置前,请在碰撞检测面板中开启工件碰撞检测。
| 不检测碰撞会增加碰撞风险,请谨慎开启以下选项。 |
不检查与场景物体的碰撞
勾选该选项后,将不检测已持有工件与场景模型的碰撞,减少软件碰撞检测计算量,提升路径规划速度,优化整体节拍。
不检查与机器人的碰撞
勾选该选项后,将不检测已持有工件与机器人的碰撞,减少软件碰撞检测计算量,提升路径规划速度,优化整体节拍。
不检查与点云的碰撞
在碰撞检测面板中开启点云碰撞检测后,如果勾选此选项,将不再检测已持有工件与点云的碰撞,减少软件计算量,缩短路径规划时间,提升整体节拍。
|
基本运动配置
基本运动配置为移动类步骤主要调节参数,用来控制机器人移动到该路径点的速度及运动方式。
抓放设置
使用抓放设置可用于 Mech-Viz 工程运行逻辑检查。按照现场实际运行流程,先抓后放的基本原则,对移动类步骤进行抓、放设置。
未指定 |
默认值 |
抓 |
“视觉移动“前的移动类步骤。 |
放 |
“视觉移动”之后的移动类步骤。 |
运动方式
关节运动 |
指机器人运行路径是弧线,路径更圆滑,运动过程中不容易出现奇异点。 适用于路径精度要求不高、机器人大范围运动的场景。 |
直线运动 |
指机器人运行路径为直线,对机器人路径要求较高。 适用于焊接、涂胶、抓取过程等路径要求较高的场景。 |
奇异点规避
当运动方式为直线运动时,开启该功能可使用多段关节运动模拟直线运动,在一定程度上减少奇异点问题。
详细参数设置
| 运动段数限制 | 固定 | 不限 |
|---|---|---|
功能 |
使用用户指定段数的关节运动模拟直线运动。 |
软件自行计算模拟直线运动所需的分段数量。 |
优点 |
|
|
缺点 |
|
|
| 参数 | 解释 |
|---|---|
运动段数 |
当运动段数限制为固定时,用户指定关节运动的段数。 |
位置偏移上限 |
新的多段关节运动路径允许偏移原有直线运动路径的最大距离。 位置偏移上限越大,奇异点规避的成功率越高,同时实际轨迹与直线的接近程度越低。 |
角度偏移上限 |
新的多段关节运动路径允许偏移原有直线运动路径的最大角度。 角度偏移上限越大,奇异点规避的成功率越高,同时实际轨迹与直线的接近程度越低。 |
速度&加速度
速度&加速度参数决定机器人运行快慢,一般加速度参数低于速度参数,当加速度参数高于速度参数时,机器人运行动作不协调。
| 为保证抓取的稳定性,建议将视觉移动及其前后的运动速度设置低一些。 |
转弯半径
一般使用默认参数即可,无需调整。
-
若机器人在狭小的空间运行,机器人不需要太大的转弯半径(转弯半径指距离路径点开始转弯的距离大小,距离越大机器人动作越平滑),可适当调小转弯半径。
-
若机器人运行的空间较大,没有干扰物且机器人两段路径间距离较大,可适当调大转弯半径,使机器人动作衔接更加平顺。
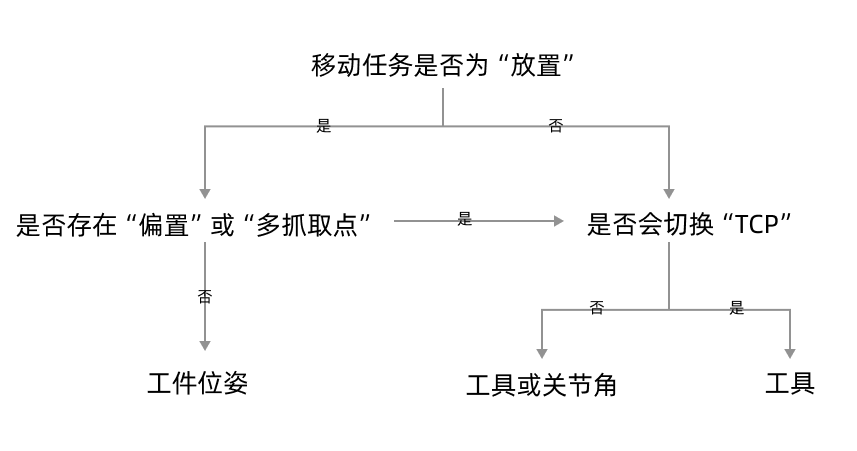
目标类型
目标类型说明
工具位姿 |
路径点将以工具坐标系的 X、Y、Z 值 + 欧拉角、四元数或旋转矢量表示。 工具位姿是工具坐标系相对于机器人基坐标系的位姿描述。这种描述方式更贴近任务空间,侧重于描述机器人执行任务时末端工具(如机械手爪、焊枪等)的位置和朝向。 |
关节角 |
路径点将以机器人每个关节的数值表示。 关节角是机器人的各个关节相对于其初始位置或基准位置的旋转角度。这种描述方式更贴近机器人的硬件结构,表示每个关节的状态。 |
工件位姿 |
路径点将以物体坐标系的 X、Y、Z 值 + 欧拉角、四元数或旋转矢量表示。这种描述方式侧重于描述机器人执行任务时需要操作或处理的实际工作对象的位置和朝向。 工件位姿是工件上某一点相对于机器人坐标系的位姿。 |
| 当目标类型为工件位姿时,请勿在Mech-Vision中使用位姿调整类步骤调整抓取点,否则可能导致抓取不准确。 |
选择目标类型的判断方式如下图所示。
参数说明
编辑位姿 |
直接编辑位姿,可复制和粘贴,支持四元数和欧拉角两种格式。 |
变换位姿 |
通过定义变换的方式将当前位姿变换到新位姿,适用于微调位姿的场景。 |
校准位姿 |
用法类似机器人三点法计算工件坐标系,适用于物体旋转姿态不好确定的场景;比如长方体倾斜时,旋转位姿很难确定,可使用校准位姿计算出长方体旋转姿态,让机器人按照计算出的姿态运行。 |
编辑关节角 |
与编辑位姿用法类似,可复制和粘贴,支持弧度和角度两种格式。 |
|
获取当前仿真机器人的位姿。 |
|
移动仿真机器人到当前设置的位姿。 |
|
列出所有可能的关节角解。 |


关节角约束条件
名词解释
| 肩 |
腕关节中心与 Axis1 的相对位置关系,其中 Axis1 指机器人 1 轴转动中心轴线。 |
| 肘 |
腕关节与 LowerArm 的相对位置关系, LowerArm 指机器人 2 轴、3 轴转动中心的连线。 |
| 腕 |
机器人 5 轴指腕关节,5轴角度的正负关系表示翻腕情况,Wrist center 指腕关节中心。 |
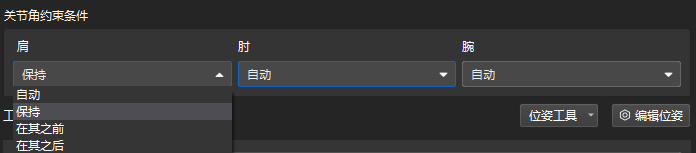
值列表
| 自动 |
机器人此关节完全无约束,最终选解依据为各轴转动最小为最优。 |
| 保持 |
将机器人的当前状态记为状态 A 对机器人进行约束,Mech-Viz 工程中的下一个移动选解时,选择与状态 A 保持一致的解为可行解。以机器人 3 轴为例,当前状态中机器人 3 轴的角度为正,移动选解时,仅机器人 3 轴为正的解为可行解。 |
| 在其之前 |
腕关节中心在 Axis1 的前方。 |
| 在其之后 |
腕关节中心在 Axis1 的后方。 |
单击  会弹窗显示此位姿对应的所有可能关节位置。
点击其中的一个位姿,在三维仿真区可以查看机器人的姿态,即可得知不同约束条件下还有哪些可行解。
会弹窗显示此位姿对应的所有可能关节位置。
点击其中的一个位姿,在三维仿真区可以查看机器人的姿态,即可得知不同约束条件下还有哪些可行解。
-
关节角约束条件设置仅限6轴机器人使用,4轴机器人认为不存在翻肩、翻肘、翻腕的问题。
-
软件中相对移动、自定义垛型和预设垛型不支持此设置,默认设置保持,使肩、肘、腕都不改变,即这些步骤限制机器人运行时不会跨解系(经过奇异点)。