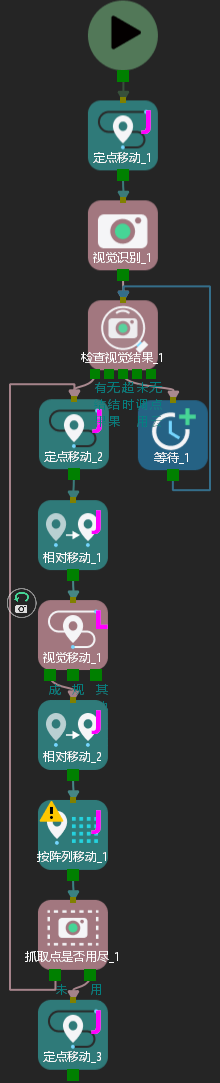
抓取点是否用尽 您正在查看V2.1.0版本的文档。如果您想查阅其他版本的文档,可以点击页面右上角“切换版本”按钮进行切换。 ■ 如果您想使用最新版本,可以从梅卡曼德下载中心下载。 ■ 如果您不确定当前使用的产品是哪个版本,请随时联系梅卡曼德技术支持。 功能描述 检查所选的 “视觉移动” 接收的视觉结果中的抓取点是否用完,仅起检查作用。 此步骤在 “视觉移动” 参数中的复用视觉结果或共享视觉结果勾选时才可使用。 使用场景 当 “视觉移动” 的视觉结果中存在多个可使用的视觉位姿时,软件控制机器人逐个抓取,直至当前视觉结果中的可用视觉位姿用尽。 视觉结果中视觉位姿用尽时,进行一次拍照处理。在对于节拍要求较高的场景中,复用视觉结果可缩短视觉处理时间。 参数说明 预规划出口 为了保证规划的连续性,需要指定预规划的出口,一般指定可能性最大的分支,降低重新规划的概率,减少机器人等待时间。 -1 不指定预规划的出口。 0 工程会通过未用尽出口继续执行。 1 工程会通过用尽出口继续执行。 选择视觉移动 选择需要检查的“视觉移动”步骤。 应用示例 拆垛流程中通常拍照一次,抓取整层纸箱。抓取点是否用尽步骤可用于判断同一层上的所有纸箱是否都已被抓取。示例效果如下。 抓取点未用尽:重复抓取动作。 抓取点用尽:机器人走用尽出口。 该页面是否有帮助? 我要反馈 感谢您的支持! 可以通过以下方式反馈意见: 社区 反馈表单 更新场景物体 程序停止