视觉结果用尽
使用场景
当 “视觉移动” 的视觉结果中存在多个可使用的视觉位姿时,软件控制机器人逐个抓取,直至当前视觉结果中的可用视觉位姿用尽。
视觉结果中视觉位姿用尽时,进行一次拍照处理。在对于节拍要求较高的场景中,复用视觉结果可缩短视觉处理时间。
参数说明
非移动步骤基本参数
应用示例
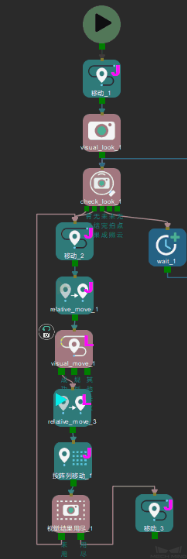
拆垛流程中通常拍照一次,抓取整层纸箱,通过 视觉结果用尽 判断 视觉移动 中的结果是否用完。示例效果如下。
-
视觉结果 未用尽:重复抓取动作,“移动_2 → 相对移动_1 → 视觉移动_1 → 相对移动_3 → 按阵列移动_1 → 视觉结果用尽” 。
-
视觉结果 用尽:机器人走 用尽 出口。