Mech-Interface
Mech-Interface是梅卡曼德软件系统的对外接口服务,作为与外部通信的桥梁,其作用是接收外部信息、发送系统内部信息,包含 标准接口 和 Adapter。 本节主要介绍Mech-Interface两种通信方式(标准接口和Adapter)的机制、比较以及应用场景。
通信机制
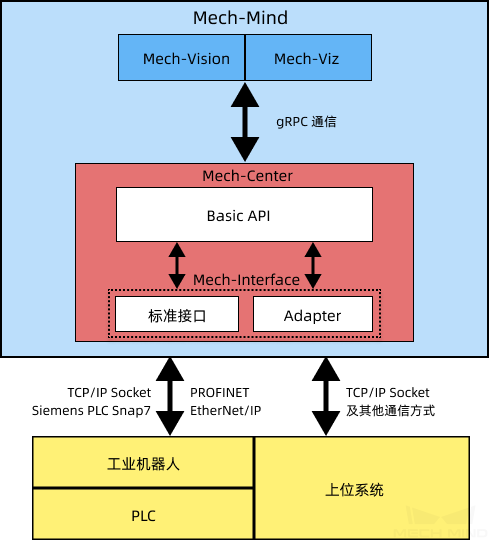
两种通信方式的机制如下图所示:
-
Adapter是连接外部通信设备(工业机器人、上位机、PLC)与Mech-Vision和Mech-Viz软件的Python适配程序,对内与Mech-Vision和Mech-Viz进行通信,对外与外部设备进行通信。
-
标准接口是梅卡曼德提供的一套完整的Adapter程序,支持多种通信协议,拥有强大的控制指令集和异常报警系统,可以满足大部分的用户需求。
标准接口和Adapter的比较
Adapter和标准接口都是连接外部设备与Mech-Vision和Mech-Viz软件的适配程序。标准接口是梅卡曼德提供的一套固定的Adapter程序,不支持二次开发。
它们对内通过调用Basic API与Mech-Vision和Mech-Viz进行通信,对外通过特定的通信协议与外部设备进行通信。
标准接口和Adapter的详细对比如下表所示。
| 对比 | 标准接口 | Adapter |
|---|---|---|
对内通信 |
都通过调用Basic API与Mech-Vision和Mech-Viz进行通信。 |
|
对外通信协议 |
标准接口仅支持使用如下通信协议与外部设备通信: - TCP/IP Socket - UDP - Siemens PLC Snap7 - PROFINET - EtherNet/IP - Modbus TCP - 三菱 MC |
Adapter支持使用任何Python支持的通信协议与外部设备通信。 |
功能 |
标准接口仅支持提供视觉结果。 |
Adapter不仅提供视觉相关的功能,还可以提供Python支持的功能,例如界面、数据库和订单系统。 |
部署难度 |
标准接口,简单易用,可以快速完成部署。 |
Adapter需要由用户编写程序,时间和人工成本较高。 |
可扩展性 |
不支持功能扩展。 |
可以扩展支持更多的通信协议,支持更多的功能。 |
应用说明
在实际应用场景中,通常要根据外部通信对象、所使用的通信协议以及项目需要的通信功能等来确定使用何种类型的Mech-Interface。
标准接口和Adapter支持的常见通信对象和通信协议如下表所示。
| 通信对象 | 通信协议 | Mech-Interface类型 | 说明 |
|---|---|---|---|
机器人 |
TCP/IP Socket |
标准接口 |
Mech-Interface作为TCP/IP Socket的服务端。 |
UDP |
Mech-Interface作为UDP的服务端。 |
||
PROFINET |
Mech-Interface作为PROFINET从站设备。 |
||
EtherNet/IP |
Mech-Interface作为EtherNet/IP从站设备。 |
||
Modbus TCP |
Mech-Interface作为Modbus TCP从站设备。 |
||
上位机 |
HTTP |
Adapter |
适用于集成项目,采用机器人主控方式。 |
WebSocket |
|||
TCP/IP Socket |
标准接口 |
Mech-Interface作为TCP/IP Socket的服务端。 |
|
PLC |
TCP/IP Socket |
标准接口 |
Mech-Interface作为TCP/IP Socket的服务端。 |
Siemens PLC Snap7 |
Mech-Interface作为西门子PLC Snap7客户端。 |
||
PROFINET |
Mech-Interface作为PROFINET从站设备。 |
||
EtherNet/IP |
Mech-Interface作为EtherNet/IP从站设备。 |
||
Modbus TCP |
Mech-Interface作为Modbus TCP从站设备。 |
||
三菱 MC |
Mech-Interface作为MC客户端。 |
|
关于标准接口和Adapter更详细的信息,您可以继续阅读: