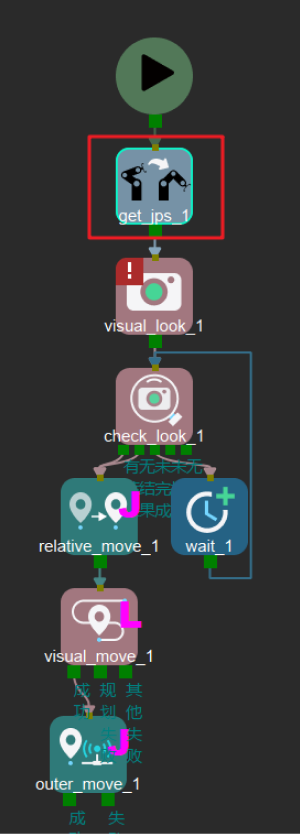
获取关节位置 您正在查看V1.7.5版本的文档。如果您想查阅其他版本的文档,可以点击页面右上角“切换版本”按钮进行切换。 ■ 如果您想使用最新版本,可以从梅卡曼德下载中心下载。 ■ 如果您不确定当前使用的产品是哪个版本,请随时联系梅卡曼德技术支持。 功能描述 获取当前所连机器人的关节角信息,并将其关节角信息同步到 Mech-Viz 中。 使用场景 当 Mech-Viz 不完全控制机器人的所有运动时,使用此步骤获取机器人自主运动后的关节角信息来维持控制。 参数说明 非移动步骤基本参数 跳过执行 无 默认值,不跳过当前步骤。 仅仿真时 仿真时跳过当前步骤,出口由 跳过执行时出口 指定。 总是 实际运行和仿真时均跳过执行,出口由 跳过执行时出口 指定。 调节说明 设置为 仅仿真时 或 总是 后,工程运行过程中将跳过当前步骤,继续向下运行。假设工程中连接了“检查DI”,在仿真时并无外部输入信号,若不设置跳过执行,工程运行到此步骤将停止,设置此参数后,将不执行此步骤,直接继续向下运行,完成仿真。 跳过执行时出口 当 跳过执行 值为 仅仿真时 或 总是 时,此功能生效,表示跳过该步骤后执行的出口。 应用示例 视觉识别 触发相应的 Mech-Vision 工程前,通过 获取关节位置 来获取真实机器人的关节角信息,将其更新至 Mech-Viz 中作为规划的起始位置。 该页面是否有帮助? 我要反馈 感谢您的支持! 可以通过以下方式反馈意见: 社区 反馈表单 检查工具 设置负载