机器人构型
| 轴数 | 六轴 | 六轴 | |
|---|---|---|---|
构型 |
构型名称 |
UR_UR5_Like |
SphericalWrist_SixAxis |
构型描述 |
六轴协作机器人 |
常见工业六轴球型腕机器人 |
|
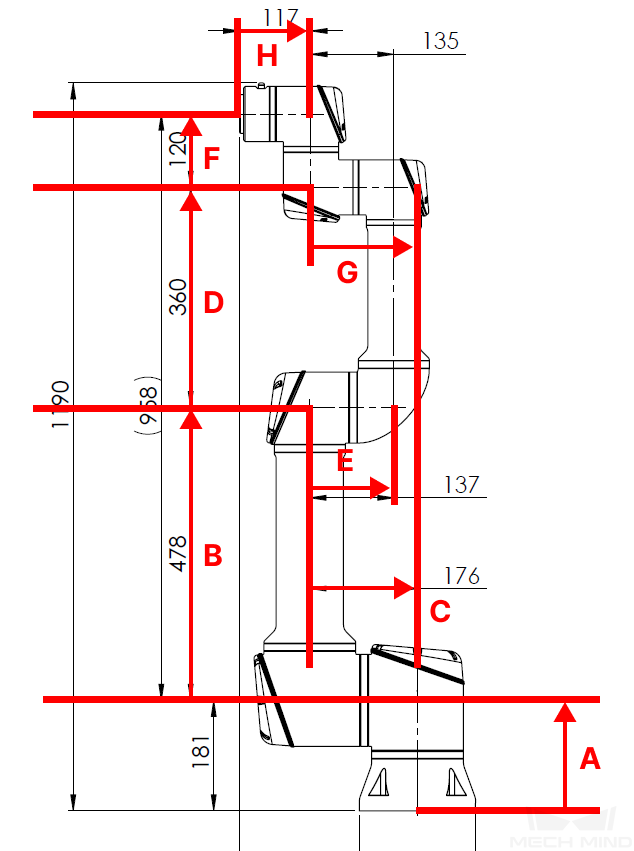
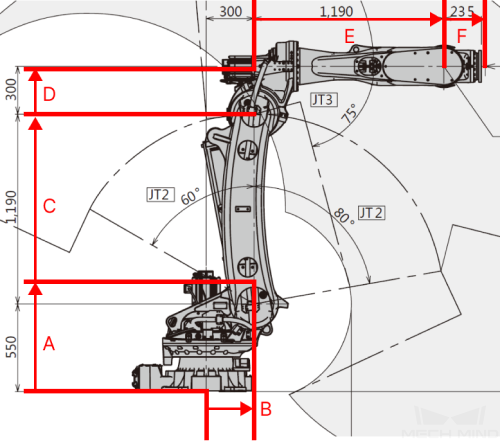
机器人构型图 |
DH参数图 |
|
|
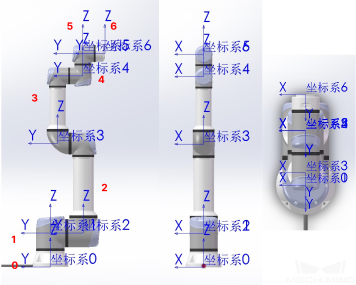
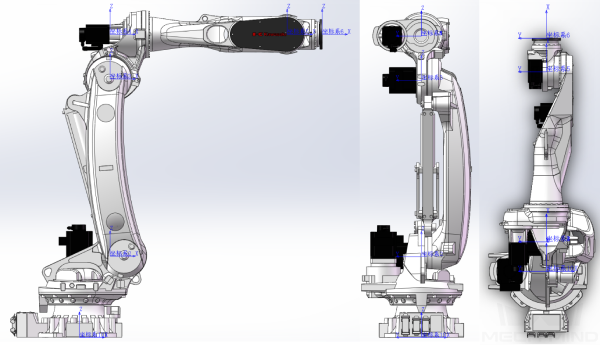
坐标系各轴名称 |
|
|
|
连杆、坐标系 对应关系 |
0:坐标系10;1:坐标系10;2:坐标系2;3:坐标系3;4:坐标系4;5:坐标系5;6:坐标系6; |
||
[robot]_algo样例 |
|
|
|
| 轴数 | 六轴 | 六轴 | |
|---|---|---|---|
构型 |
构型名称 |
UR_UR5_Like |
SphericalWrist_SixAxis |
构型描述 |
六轴协作机器人 |
常见工业六轴球型腕机器人 |
|
机器人构型图 |
DH参数图 |
|
|
坐标系各轴名称 |
|
|
|
连杆、坐标系 对应关系 |
0:坐标系10;1:坐标系10;2:坐标系2;3:坐标系3;4:坐标系4;5:坐标系5;6:坐标系6; |
||
[robot]_algo样例 |
|
|
|