选择机器人手眼标定流程
手眼标定是指 建立相机坐标系与机器人坐标系对应关系的过程 ,将视觉系统确定的物体位姿转换为机器人坐标系下的位姿,从而引导机器人精准完成抓取任务。手眼标定结果的精度是影响机器人抓取精度重要因素之一。
当搭建完成梅卡曼德视觉系统后,你可以进行成机器人手眼标定。此外,在如下情况下,你需要重新进行机器人手眼标定:
-
相机相对于机器人基座(相机 Eye to Hand 安装方式)或者法兰(相机 Eye in Hand 安装方式)发生位置变化。
-
更换相机。
-
更换机器人。
选择合适的标定流程
机器人通信方式、相机安装方式、标定方式和采集标定数据方法,都影响具体的标定过程。Mech-Vision 针对不同场景提供了标准化的标定流程,方便快速和准确地完成相机内参和外参的标定。
|
关于机器人通信方式、相机安装方式、标定方式和采集标定数据方法的解释,请参考 标定相关概念。 |
请参照本节的指导选择合适的标定流程。
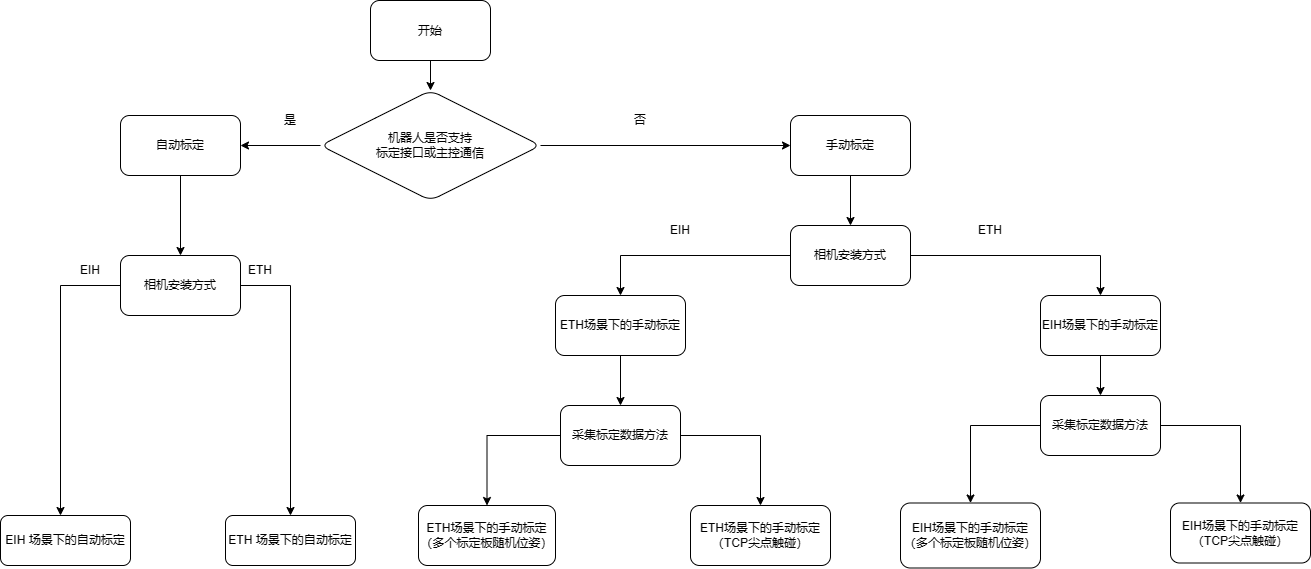
-
确定机器人是否支持标准接口或主控通信。
-
如果支持,选择自动标定,执行步骤 2。
-
如果不支持,选择手动标定,执行步骤 3。
-
-
确定自动标定时的相机安装方式。
-
如果相机安装方式为 Eye to Hand (ETH),选择 ETH 场景下的自动标定流程。
-
如果相机安装方式为 Eye in Hand (EIH),选择 EIH 场景下的自动标定流程。
-
-
确定手动标定时的相机安装方式。
-
如果相机安装方式为 ETH,确定采集标定数据方法。
-
如果采集标定数据方法为标定板多个随机位姿,选择 ETH 场景下的手动标定(标定板多个随机位姿)流程。
-
如果采集标定数据方法为 TCP 尖点触碰,选择 ETH 场景下的手动标定(TCP尖点触碰)流程。
-
-
如果相机安装方式为 EIH,确定采集标定数据方法。
-
如果采集标定数据方法为标定板多个随机位姿,选择 EIH 场景下的手动标定(标定板多个随机位姿)流程。
-
如果采集标定数据方法为 TCP 尖点触碰,选择 EIH 场景下的手动标定(TCP尖点触碰)流程。
-
-
如果项目采用双相机,请参照 Eye to Eye 场景下的手动标定流程 进行标定。 如果项目使用桁架机器人,请参照 桁架机器人的手眼标定流程 进行标定。