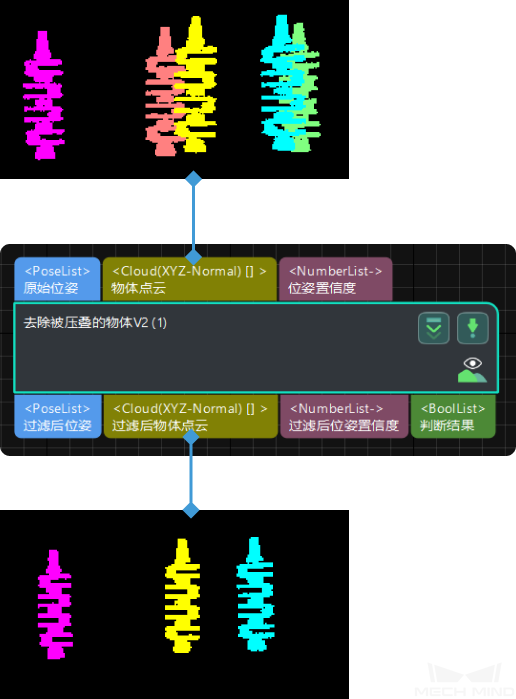
去除被压叠的物体V2
使用场景
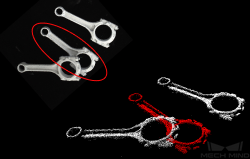
该步骤通常用于 3D精匹配 步骤之后,去除因被压叠而不适合被抓取或进行其他处理的物体的位姿。
|
去除被压叠的物体V2 步骤对“投影(2D)”方法进行了优化,对于“投影(2D)”方法,推荐使用 去除被压叠的物体V2 步骤。 去除被压叠的物体V2 步骤对“包围盒(3D)”方法未作修改,对于“包围盒(3D)”方法,去除被压叠的物体 和 去除被压叠的物体V2 步骤均可使用。 |
参数说明
该步骤提供了两种判断物体是否被压叠的方法:
-
包围盒(3D)法:通过将点云包围盒分割成小正方体,通过计算被重叠的小正方体数量来计算重叠比例。
-
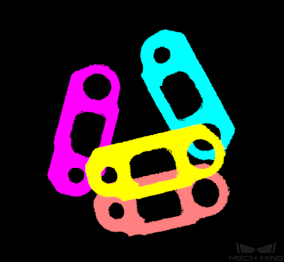
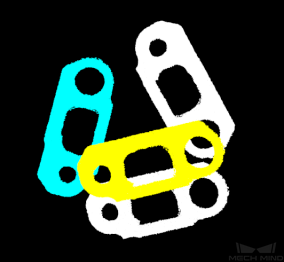
投影(2D)法:通过计算物体在 2D 平面上投影的被压叠面积比例来判断物体是否被压叠。
方法设置
包围盒(3D)
阈值设置
- 重叠比例阈值(0~1.0)
-
参数解释:重叠比例指包围盒与其他包围盒重叠部分的体积比例,该参数用于决定是否去除被压叠物体的视觉识别结果。如果某物体点云与其他物体点云重叠部分的比例超过该阈值,则该物体的视觉识别结果将被去除。
值范围:0.00~1.00
默认值:0.30
调节建议:可根据实际需求,按照步长 0.01 来尝试调整重叠比例阈值。具体效果见 调节示例 。
点云分辨率设置
- 物体点云对角线长度比例
-
参数解释:该参数用于将包围盒分割成小正方体,重叠比例阈值通过被重叠的小正方体的数量来计算。小正方体的边长=物体点云对角线长度比例*物体点云对角线长度。
默认值:2.00%
调节建议:可根据实际需求设置该参数。
物体高度设置
- 物体高度计算方式
-
参数解释:该参数用于选择计算物体高度的方式。
值列表:指定高度、从点云计算(默认值)。
-
指定高度:通过设置指定高度参数值来指定一个固定的物体高度。
-
从点云计算:该步骤将自动根据点云计算物体高度。
调节建议:如果点云较平整或点云不能体现物体完整形状,需指定物体高度。
-
- 指定高度
-
参数解释:该参数用于指定物体的高度,单位为毫米(mm)。当物体高度计算方式为指定高度时,需设置该参数。
默认值:100.000mm
调节建议:可根据实际情况设置该参数。
包围盒膨胀
- 沿 X 轴膨胀比例
-
参数解释:将包围盒沿物体位姿的 X 轴膨胀,可以更灵敏地检测到压叠。
默认值:1.0000
调节建议:可根据实际需求设置该参数。
- 沿 Y 轴膨胀比例
-
参数解释:将包围盒沿物体位姿的 Y 轴膨胀,可以更灵敏地检测到压叠。
默认值:1.0000
调节建议:可根据实际需求设置该参数。
- 沿 Z 轴膨胀比例
-
参数解释:将包围盒沿物体位姿的 Z 轴膨胀,可以更灵敏地检测到压叠。当物体高度计算方式为指定高度时,无需设置该参数。
默认值:3.0000
调节建议:可根据实际需求设置该参数。
投影(2D)
阈值设置
- 重叠比例阈值(0~1.0)
-
参数解释:重叠比例指掩膜与其他掩膜重叠部分的面积比例,该参数用于控制是否去除被压叠物体的视觉识别结果。如果某物体点云与其他物体点云重叠部分的比例超过该阈值,则该物体的视觉识别结果将被去除。
默认值:0.30
值范围:0.00~1.00
调节建议:可根据实际需求,按照步长 0.01 来调整重叠比例阈值。具体效果见 调节示例 。
高级设置
|
该组参数位于显示全部参数模式下。 |
- 投影类型
-
参数解释:该参数用于选择投影的类型。
值列表:正交投影、透视投影(默认值)。
-
正交投影:物体大小不随视野深度拉伸。
-
透视投影:物体大小随视野深度拉伸。
调节建议:可根据实际需求设置该参数。
-
- 膨胀核大小
-
参数解释:该参数用于指定膨胀投影后图像的核的大小,以避免投影出的 2D 图像上出现空白像素。
默认值:1
调节建议:可根据实际需求设置该参数。
- 降采样系数
-
参数解释:该参数用于设置降采样系数,对投影后的图像进行降采样,以提升处理速度。当投影类型为透视投影时,需设置该参数。例如:若降采样系数为 2,则 100*100 的图像会被降采样为 50*50。
默认值:2
调节建议:可根据实际需求设置该参数。
- 正交投影分辨率
-
参数解释:该参数用于设置投影成的 2D 图像上每单位长度的像素数量。当投影类型为正交投影时,需设置该参数。
默认值:500.0000
调节建议:可根据实际需求设置该参数。
- 模板周围点云移除范围
-
参数解释:通过输入的位姿及模板生成点云时,在生成的点云周围,该参数范围内的场景点云将被移除,剩余的场景点云将参与压叠检测。单位为毫米(mm)。
默认值:3.000mm
|
相机视野内的所有点云被称之为场景点云。 |
- 可视化选项
-
参数解释:该参数用于选择想要可视化的内容。
值列表:过滤后结果(默认值)、突出显示已移除部分的场景点云、投影图像。
-
过滤后结果:在调试输出窗口查看去除被压叠物体后的结果。
-
突出显示已移除部分的场景点云:场景点云需要参与压叠检测,尤其是那些未识别的物体部分,在进行压叠检测之前,需要移除场景点云中已识别的物体部分,以便为物体点云腾出空间。物体点云即输入的位姿和模板生成的点云。
-
投影图像:查看列表中第一个物体的投影,以预览投影效果。
调节建议:可根据实际需求设置该参数。具体效果见 调节示例 。
-