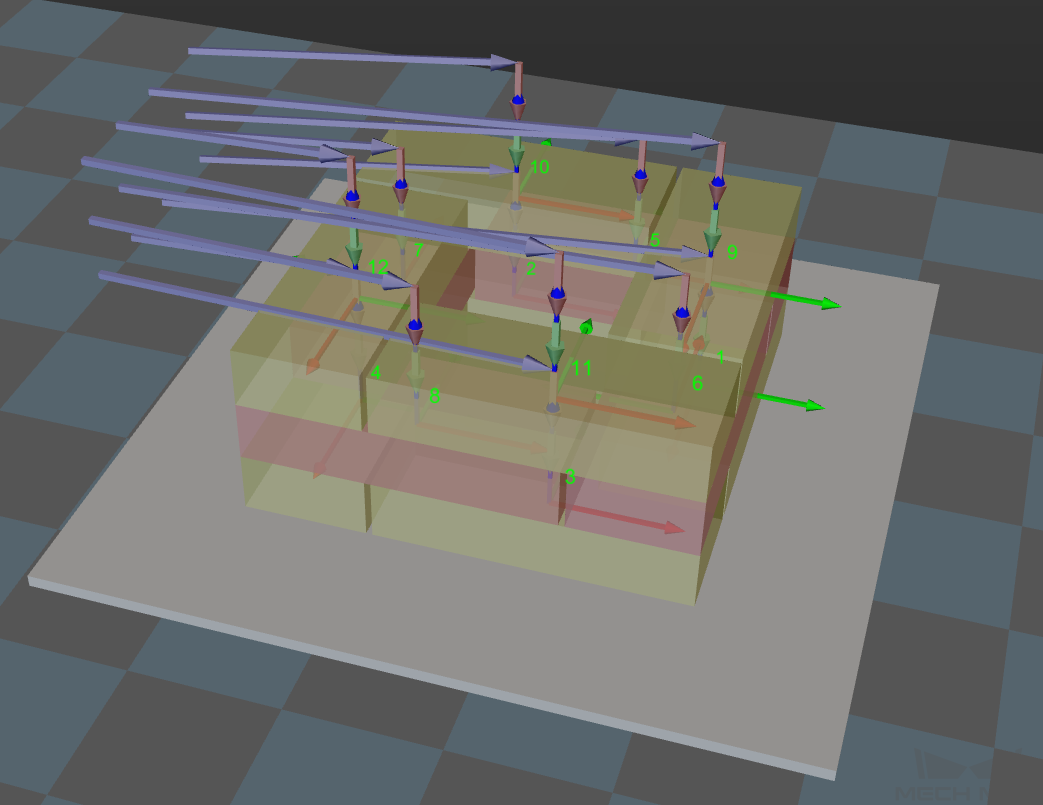
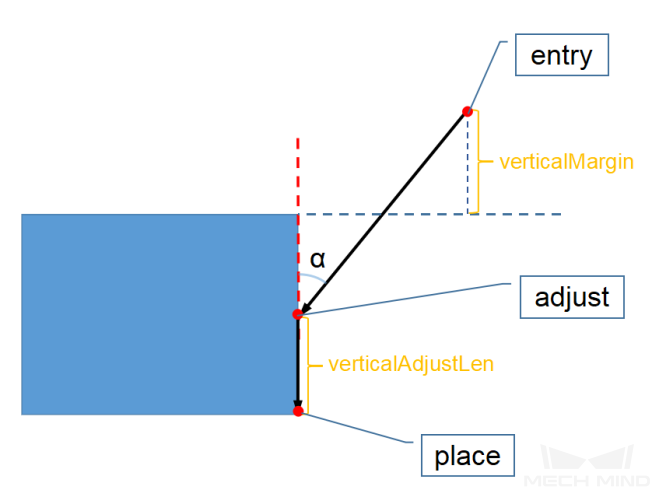
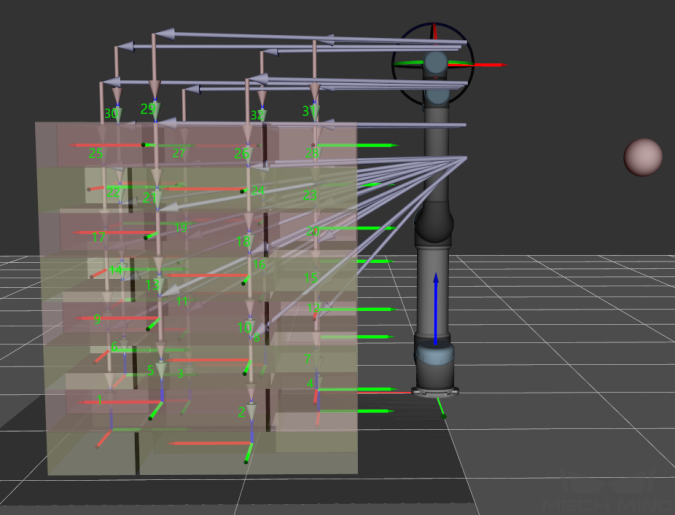
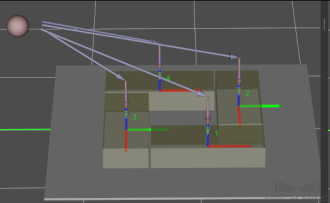
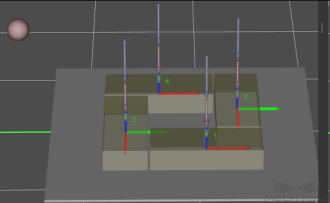
您正在查看V1.7.5版本的文档。如果您想查阅其他版本的文档,可以点击页面右上角“切换版本”按钮进行切换。 ■ 如果您想使用最新版本,可以从梅卡曼德下载中心下载。 ■ 如果您不确定当前使用的产品是哪个版本,请随时联系梅卡曼德技术支持。 索引 开始索引 说明 将要放置箱子的索引。 值 整数,默认值为 0。 使用方法 码垛为空垛时,值为 0 。 如码垛中断后继续码垛,已知已码 N 个箱子,此时需要将值设置为 N,程序自动从第 N+1 个箱子开始继续码垛。 当前索引 说明 显示箱子位置。值为 N 时,展示第 N+1 次码垛的箱子。 值 整数,自动读取;当有外部指令时,根据外部指令更新。 垛型基本设置 隐藏轨迹 默认不勾选,显示箱子入垛轨迹。勾选后箱子入垛轨迹被隐藏。 物体个数 显示托盘上可码放的物体个数,不可编辑。 运动控制 中间点段强制关节运动 默认勾选,机器人码垛前的移动为关节运动。 进入段/调整段/放置段强制关节运动 默认不勾选,不强制关节运动。 当现场操作空间较小,码垛需要直线运动时,勾选此参数。由于空间狭小经常遇到奇异点,此时可选择性指定进入段/放置段/调整段为关节运动。 加速度 & 速度缩放比例 值 0~100%,默认值为 100%。 使用场景 机器人接近垛与实际放箱子时的速度不一样时使用。 说明 实际放置箱子时的加速度&速度。通过 加速度 & 速度 × 加速度 & 速度缩放比例 获得。 进入垛分为 3 段运动: 第一段:紫色(接近垛),第二段:粉色(放置箱子),第三段:绿色(放置箱子) 接近垛(紫色)的速度和加速度在“基本运动配置”中指定,而后两段机器人运动的速度/加速度则为 加速度 & 速度 × 加速度 & 速度缩放比例 。 进入与调整 本组三个参数共同控制箱子入垛时的进入路径。调整进入路径,使箱子先以一定角度迫近已码好的箱子,再竖直放下。目的是避免当机器人直接竖直放下箱子时,由于精度或其他原因导致碰撞已码好的箱子。 对于每个箱子,入垛时共有4个位置,本组参数控制其中的三个,如下图中红点所示,分别为 entry、adjust 和place。下图的视角为放置箱子的主视图。 竖直方向调整长度比例 说明 影响调整点(上图 adjust)位置。参数 = verticalAdjustLen / 箱子高度 取值范围 0~1 推荐值 0.5 竖直方向裕度 说明 决定切入点(上图 entry)位置。参数 = 高度裕度。 取值范围 0 ~ 无穷大,单位:mm。 用于留出余量,具体数值视应用场景而定。 Z 向进入角度 说明 决定从切入点(上图 entry)到调整点(上图 adjust)路径与竖直方向夹角(上图 α),单位:° 。 取值范围 -80°~80° 推荐值 30°~45° 自动中间点 X/Y 设置机器人基坐标系下粉色小球的位置 x,y。根据此位置,不同高度的垛将自动计算合理的中间点坐标。 最小 Z 高度 机器人进入时(紫色路径)的 z 向最小绝对高度(Z 向高度与本层高度的差值),如下图所示。 竖直的中间点进入路径 默认不勾选,进入段按照中间点方向进入。 勾选后进入段不再按照中间点方向进入,而是从每个待码位置的正上方进入,如下图所示。 进入段延长距离 适用于夹具过大,进入段的长度无法保证夹具不与已码垛型碰撞的情况。可设置延长进入段距离,保证运行安全。 自动中间点 仅为进入垛的方向指示,而非机器人真实到达的点,因此粉色小球应尽量远离托盘,若小球相对垛过近,放箱子的过程中极大可能会挤压碰撞。 通过视觉调整码垛 通过“视觉识别”步骤动态调整垛的位置。 通过视觉调整托盘位置 默认不勾选。勾选后适用于动态调整垛位置的情况,程序运行到此步骤时会调用“视觉识别”步骤识别垛的位置。 视觉服务名称 填写识别垛位置的 Mech-Vision 工程名称( “视觉识别”步骤),程序运行到此步骤时会根据 Mech-Vision 工程名称调用“视觉识别”步骤。 参数 也可通过外部设置(Adapter)调节。 该页面是否有帮助? 我要反馈 感谢您的支持! 可以通过以下方式反馈意见: 社区 反馈表单 视觉续码 检查工具