进入与调整
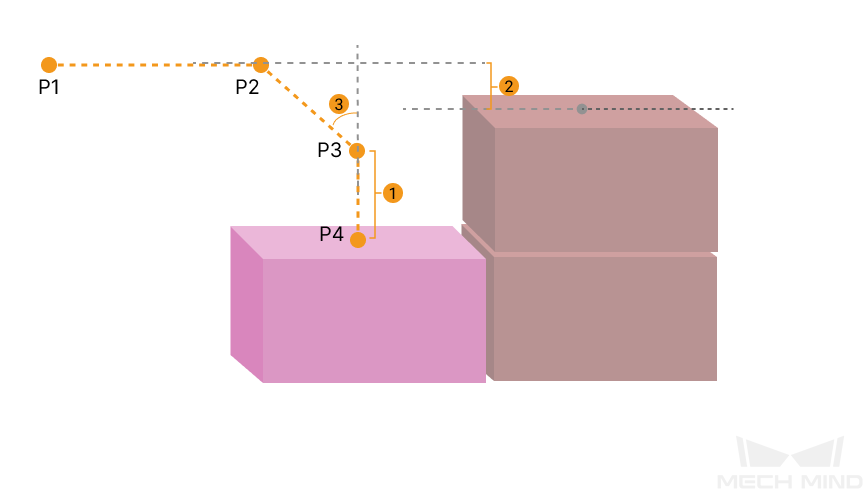
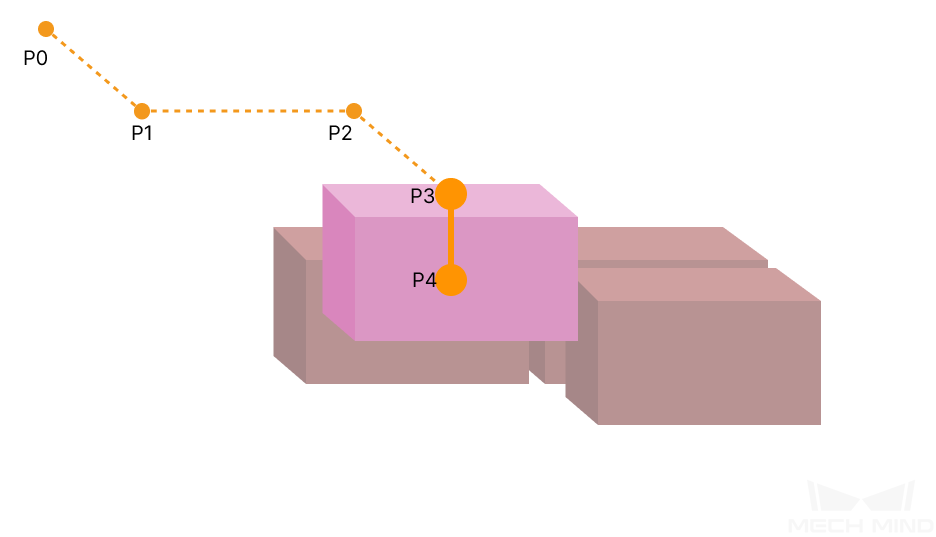
本组三个参数共同控制箱子入垛时的进入路径。通过调整进入路径,使得箱子以一定角度逼近已码好的箱子,然后再竖直放下。这样的设计旨在避免机器人直接竖直放下箱子时可能因为精度或其他原因导致与已码好的箱子发生碰撞。
对于每个箱子,入垛时共有4个位置,本组参数控制其中的3个,分别为进入点(P2)、调整点(P3)和放置点(P4)。
|
1:竖直方向调整长度、2:竖直方向裕度、3:Z向进入角度 |
| 参数 | 说明 |
|---|---|
竖直方向调整长度比例 |
如右图所示,竖直方向调整长度比例 = 竖直方向调整长度(1)/ 箱子高度。 |
取值范围: 0~1;推荐值: 50% 。 |
|
竖直方向裕度 |
如右图标记 2 。 |
取值范围: 0 ~ 无穷大;单位:mm;具体数值视应用场景而定。 |
|
Z向进入角度 |
如右图标记 3 。 |
取值范围: -80°~80°;推荐值: 30°~45° 。 |
基本运动配置
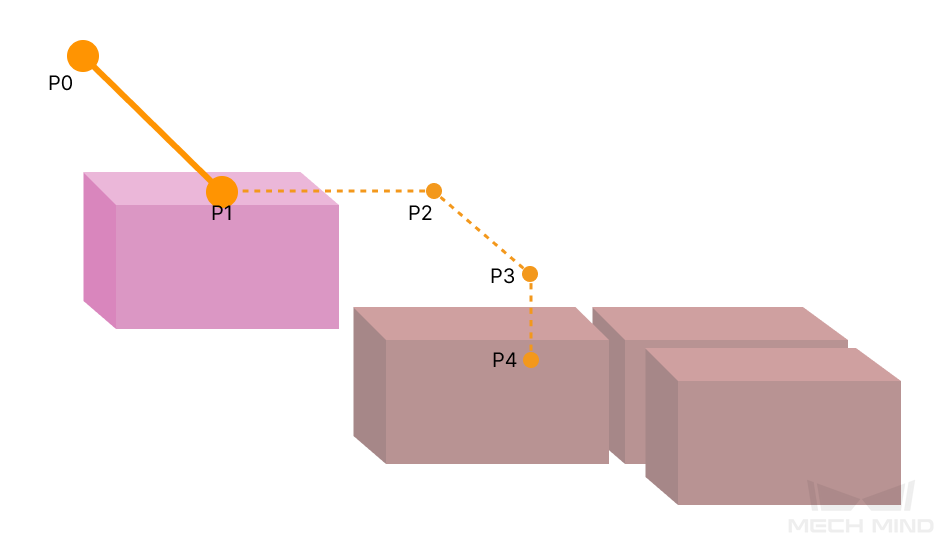
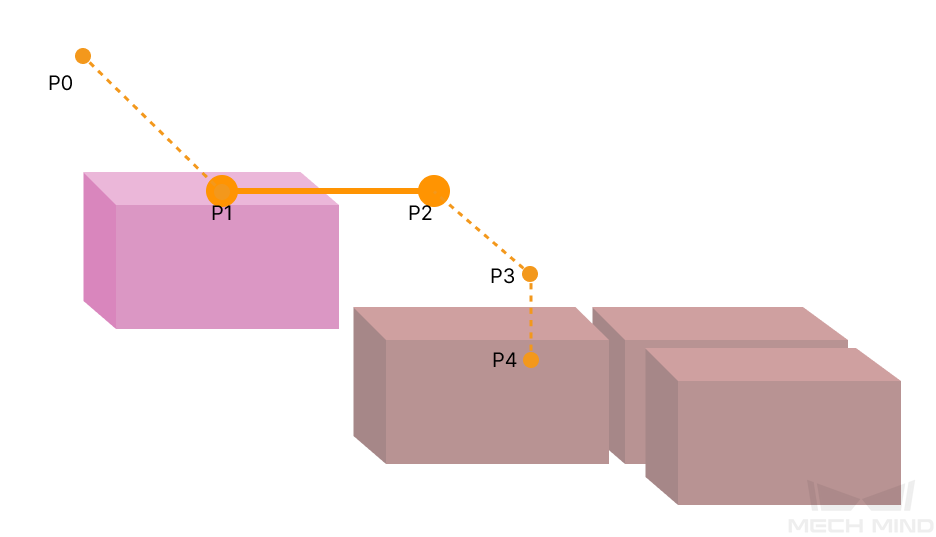
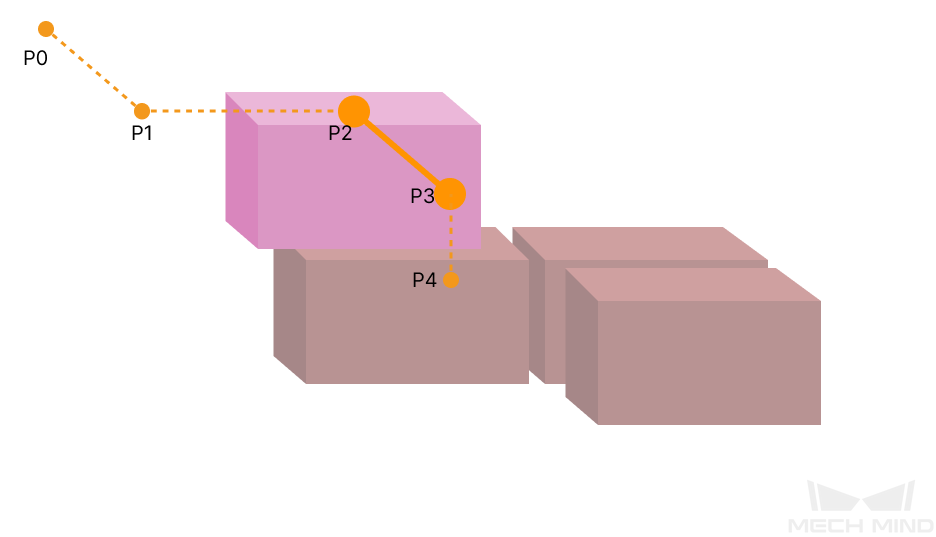
箱子码放时的部分轨迹如下表:
|
|
|
|
-
P0:基点、P1:中间点、P2:进入点、P3:调整点、P4:放置点。
-
P0-P1:中间点段、P1-P2:进入段、P2-P3:调整段、P3-P4:放置段。
运动方式
关节运动 |
指机器人运行路径是弧线,路径更圆滑,运动过程中不容易出现奇异点。 适用于路径精度要求不高、机器人大范围运动的场景。 |
直线运动 |
指机器人运行路径为直线,对机器人路径要求较高。 适用于焊接、涂胶、抓取过程等路径要求较高的场景。 |
奇异点规避
当运动方式为直线运动时,开启该功能可使用多段关节运动模拟直线运动,在一定程度上减少奇异点问题。
详细参数设置
| 运动段数限制 | 固定 | 不限 |
|---|---|---|
功能 |
使用用户指定段数的关节运动模拟直线运动。 |
软件自行计算模拟直线运动所需的分段数量。 |
优点 |
|
|
缺点 |
|
|
| 参数 | 解释 |
|---|---|
运动段数 |
当运动段数限制为固定时,用户指定关节运动的段数。 |
位置偏移上限 |
新的多段关节运动路径允许偏移原有直线运动路径的最大距离。 位置偏移上限越大,奇异点规避的成功率越高,同时实际轨迹与直线的接近程度越低。 |
角度偏移上限 |
新的多段关节运动路径允许偏移原有直线运动路径的最大角度。 角度偏移上限越大,奇异点规避的成功率越高,同时实际轨迹与直线的接近程度越低。 |
速度&加速度
速度&加速度参数决定机器人运行快慢,一般加速度参数低于速度参数,当加速度参数高于速度参数时,机器人运行动作不协调。
| 为保证抓取的稳定性,建议将视觉移动及其前后的运动速度设置低一些。 |
转弯半径
一般使用默认参数即可,无需调整。
-
若机器人在狭小的空间运行,机器人不需要太大的转弯半径(转弯半径指距离路径点开始转弯的距离大小,距离越大机器人动作越平滑),可适当调小转弯半径。
-
若机器人运行的空间较大,没有干扰物且机器人两段路径间距离较大,可适当调大转弯半径,使机器人动作衔接更加平顺。