筐内智能路径
参数说明
允许末端工具筐内旋转
不勾选时,筐内路径点的朝向与抓取点一致。勾选后,软件将自动调整筐内路径点的朝向,使机器人运动路径更加平滑。但由于末端工具在持有工件时会旋转,筐内发生碰撞的风险增加,路径规划失败的几率也随之提升。
第1/2段路径运动方式
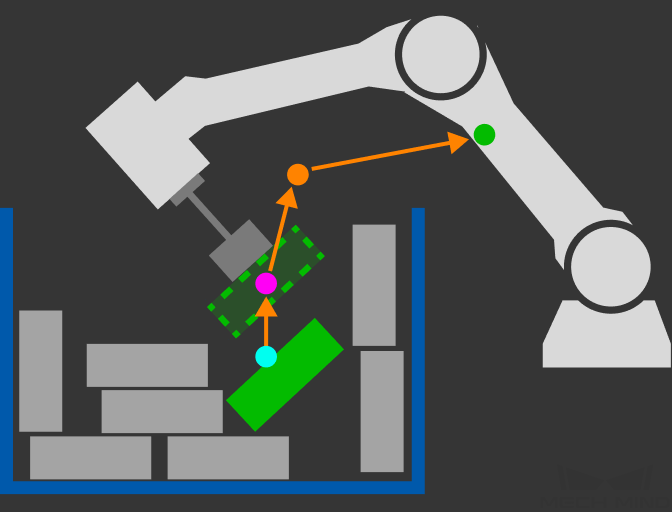
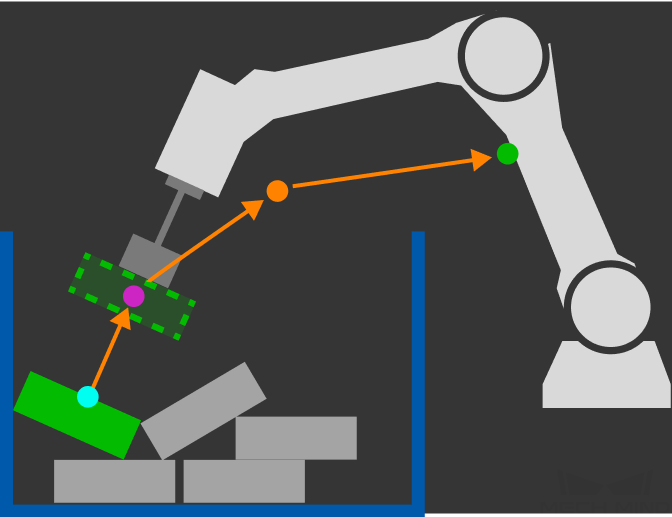
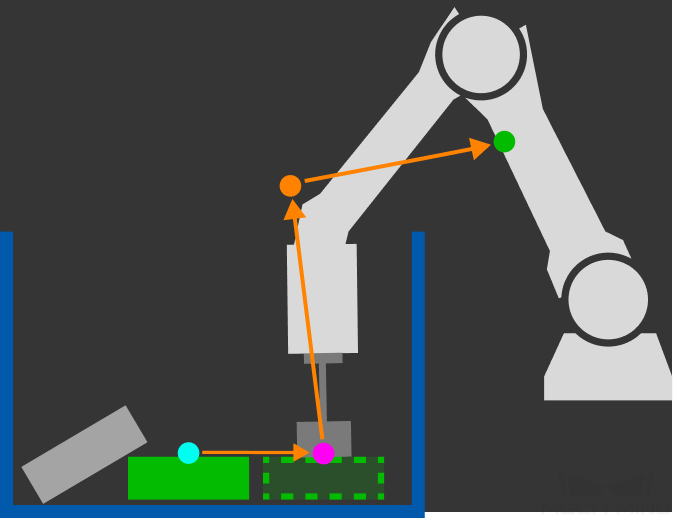
对于入筐路径,即抓取阶段为抓取前时,第1段路径运动方式推荐选择关节运动,第2段路径运动方式推荐选择直线运动。
对于出筐路径,即抓取阶段为抓取后时,第1段路径运动方式推荐选择直线运动,第2段路径运动方式推荐选择关节运动。
奇异点规避
当运动方式为直线运动时,开启该功能可使用多段关节运动模拟直线运动,在一定程度上减少奇异点问题。
详细参数设置
| 运动段数限制 | 固定 | 不限 |
|---|---|---|
功能 |
使用用户指定段数的关节运动模拟直线运动。 |
软件自行计算模拟直线运动所需的分段数量。 |
优点 |
|
|
缺点 |
|
|
| 参数 | 解释 |
|---|---|
运动段数 |
当运动段数限制为固定时,用户指定关节运动的段数。 |
位置偏移上限 |
新的多段关节运动路径允许偏移原有直线运动路径的最大距离。 位置偏移上限越大,奇异点规避的成功率越高,同时实际轨迹与直线的接近程度越低。 |
角度偏移上限 |
新的多段关节运动路径允许偏移原有直线运动路径的最大角度。 角度偏移上限越大,奇异点规避的成功率越高,同时实际轨迹与直线的接近程度越低。 |
速度&加速度
速度&加速度参数决定机器人运行快慢,一般加速度参数低于速度参数,当加速度参数高于速度参数时,机器人运行动作不协调。
| 为保证抓取的稳定性,建议将视觉移动及其前后的运动速度设置低一些。 |
转弯半径
一般使用默认参数即可,无需调整。
-
若机器人在狭小的空间运行,机器人不需要太大的转弯半径(转弯半径指距离路径点开始转弯的距离大小,距离越大机器人动作越平滑),可适当调小转弯半径。
-
若机器人运行的空间较大,没有干扰物且机器人两段路径间距离较大,可适当调大转弯半径,使机器人动作衔接更加平顺。
料筐选择
请选择在工程资源树的场景物体中添加的料筐。具体操作请参考添加场景物体。
策略模式
-
选择自动时,软件会自动计算工件抓取路径。
自动模式下的抓取策略如下表所示。自动模式下,软件会自动尝试不同出筐策略。
进筐策略 出筐策略 
沿抓取点Z向进入:尝试沿抓取点Z轴方向,在工件上方寻找无碰撞位置。
远离筐壁提起:为了避免与筐壁碰撞,尝试向筐顶面中心方向提起工件。
沿世界坐标系Z向提起:尝试沿世界坐标系Z轴方向提起工件。
-
选择手动时,需自行选择至少一个抓取策略,可自定义尝试策略和不同策略下机器人的运动距离。相较于自动模式,手动模式下新增了沿抓取点Z向提起和水平抽出两种策略。
在以下情况中,建议使用手动模式:
-
如需机器人沿抓取点Z轴方向离开料筐,可增加沿抓取点Z向提起策略。
-
如需机器人将被压叠的工件沿水平方向抽出,可增加水平抽出策略。
-
工件高度较高,自动计算的尝试提升距离不足时,需要手动设置尝试提升距离。
-
希望只尝试一种出筐策略,以提升节拍。
手动模式下的的抓取策略如下表所示。
进筐策略 出筐策略 沿抓取点Z向进入:尝试沿抓取点Z轴方向,在工件上方寻找无碰撞位置。最多可以设置5个工件上方距离,软件会依次按照设置的距离进行尝试。
远离筐壁提起:为了避免与筐壁碰撞,尝试向筐顶面中心方向提起工件。最多可以设置5个尝试提升距离,软件会依次按照设置的距离进行尝试。
沿世界坐标系Z向提起:尝试沿世界坐标系Z轴方向提起工件。最多可以设置5个尝试提升距离,软件会依次按照设置的距离进行尝试。
沿抓取点Z向提起:尝试沿抓取点Z轴方向提起工件。最多可以设置5个尝试提升距离,软件会依次按照设置的距离进行尝试。
水平抽出:在工件抓取点所在的水平面上,尝试向料筐中心方向拖动工件。最多可以设置5个尝试拖动距离,软件会依次按照设置的距离进行尝试。
-
应用示例
请参考“筐内智能路径”样例工程文档。