其他
该功能面板用于运行设置、步骤收集设置、奇异点检测设置和全局关节约束设置。
运行设置
-
跳过相邻的移动目标
当两个路径点非常接近时,只向机器人发送前一个路径点。
-
仅使用默认工件配置
开启后,即使收到物体标签,仍然使用默认工件配置。
-
机器人服务超时时间
Mech-Viz 与机器人通信的超时时间(移动类步骤和“转移控制权”步骤除外)。默认为 1000ms 。
奇异点检测
奇异点检测的作用
机器人运动到奇异点附近可能导致部分直线运动指令无法执行,进而触发机器人报警并中断生产。奇异点检测功能在路径规划过程中能够提前预警并尝试规避路径上的奇异点,从而确保机器人的运动更加流畅,减少了系统报警和异常情况的发生,有助于保持生产连续性。
奇异点检测方法
Mech-Viz 软件通过在其他功能面板的奇异点检测中设置的最大速度、降速比、关节角度范围来检测奇异点。奇异点检测功能提供以下四种选项。
-
不检测
-
检测各关节速度
-
检测特定关节角度
-
检测各关节速度及特定关节角度。
| 奇异点检测仅对运动方式设置为直线运动的移动类步骤有效。 |
检测各关节速度
-
说明
当检测到机器人的任一关节速度大于最大速度设置值时,Mech-Viz将对应移动类步骤中设置的速度按照降速比进行降速,并再次进行检测。如果降速后的速度小于最大速度设置值,则机器人会在执行对应步骤时降速运行; 如果降速后的速度仍大于最大速度设定值,则软件会判定该运动会触发机器人奇异点,机器人无法通过奇异点检测。
降速后的速度 = 原速度 × 降速比 -
设置方法
-
在检测方法的下拉栏中选择检测各关节速度。
-
设置最大速度和降速比参数。
-
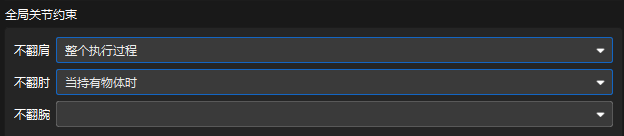
全局关节约束
|
全局关节约束的设置仅在移动类步骤参数区中关节角约束条件的相应条目设置为自动时才会生效。 |
-
不翻肩/不翻肘/不翻腕
可选择在当持有物体时或整个执行过程状态下减少机器人不必要的翻转。
当希望减少机器人不必要的翻转时,推荐将不翻肩设置为整个执行过程,不翻肘设置为当持有物体时 ,不翻腕设置为空。
当两个相邻路径点的目标类型不同时,若强行设置不翻腕,可能导致更大的翻转,如下表所示。
| 不设置不翻腕 | 整个执行过程不翻腕 |
|---|---|
|
|