平移裕度
本文介绍基于抓取点的平移裕度。
尝试范围与尝试间隔
尝试范围为抓取位姿与视觉位姿偏移距离的最大允许范围(下图所示a即为尝试范围)。
尝试间隔为每隔多少距离尝试一次抓取(下图所示b即为尝试间隔)。
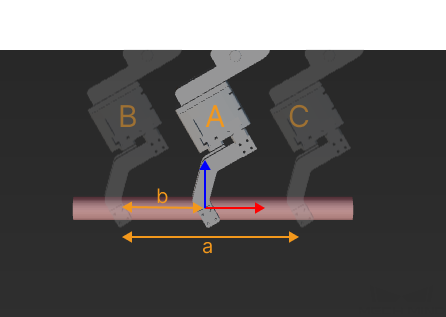
A为末端工具在抓取点的抓取姿态,B、C为在尝试范围边界的抓取姿态。
尝试次数
尝试次数根据尝试范围和尝试间隔自动计算。
假设尝试间隔为 5mm,尝试范围为 ±10mm,则:单边范围内的尝试次数为 10/5 = 2,即 2 次(分别出现在5mm和10mm)。 总尝试次数 = 1+2*2 = 5 次,(-10、-5、0、5、10)。