其他
该功能面板中可完成运行、步骤收集、奇异点、全局关节角约束相关设置。
步骤收集
- 移动类步骤最大收集个数
-
参与规划的移动类步骤最大数量,工程中移动步骤个数超过设置值后将打断规划。
- 非移动类步骤最大收集个数
-
参与规划的非移动类步骤最大数量,工程中非移动步骤个数超过设置值后将打断规划。
奇异点
机器人位于奇异点附近时可能无法执行部分直线运动指令。 为避免软件发出的运动指令导致机器人奇异点报警,需要在软件路径规划过程中提前预警并尝试规避路径上的奇异点。
奇异点检测方法 可选以下两种方法:
-
检测机器人各关节速度
通过设置关节最大速度与降速比例,过滤可能导致机器人奇异点的规划结果。
- 关节最大速度限制
-
当关节速度高于此值时,可能被判定为奇异点。
- 奇异点降速比例
-
判定奇异点的机器人降速比例阈值,机器人实际降速比例高于此值时,可能被判定为奇异点。 减速比 = 降低后的速度(或加速度)/ 设定的原始速度(或加速度)。
-
检测机器人关节角度
通过设置关节与其角度范围,过滤可能导致机器人奇异点的规划结果。
- 关节选择
-
选择机器人的关节。
- 角度下限
-
当关节角度小于此值时,可能被判定为奇异点。
- 角度上限
-
当关节角度大于此值时,可能被判定为奇异点。
全局关节约束
|
对于移动类步骤,其参数中的“关节角约束条件”设置为”自动“时,Mech-Viz 将执行此处的设置,否则执行移动类步骤参数中的“关节角约束条件”设置。 |
- 不翻肩/不翻肘/不翻腕
-
可选择在 当持有物体时 或 整个执行过程 状态下减少机器人不必要的翻转。
把肩/肘/腕全设置为“不翻”不一定是最优选择,举例如下:
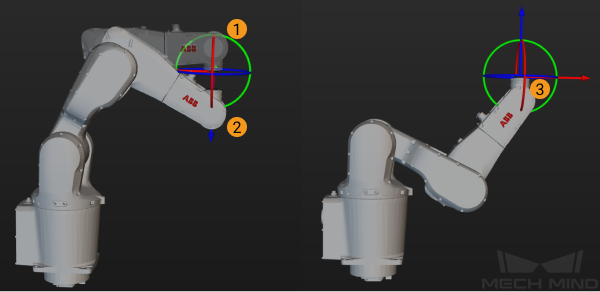
机器人由 1 移动到 2 ,若强行指定“不翻腕”可能导致机器人更大的翻转,机器人最终可能处于 3 的状态,因此应仅指定“不翻肩”与“不翻肘”。