1.7.0项目升级指南
由于Mech-Vision 1.7.0新增方案功能,引入新的方案文件结构,因此旧的Mech-Vision工程需要完成迁移才能使用。
在软件升级到1.7.0之后,请参照本文档完成项目迁移。
升级概述
| 项目情况 | 迁移方式 | 升级后操作 |
|---|---|---|
使用标准接口或 Adapter 通信,仅通过Mech-Vision工程获取视觉点。 |
迁移Mech-Vision工程到方案中,并在Mech-Vision中重新配置机器人通信。 需要单独启动Mech-Vision软件。 |
|
使用Mech-Viz完成简单的路径规划。 |
联系梅卡曼德技术支持评估Mech-Vision方案是否能够满足需求。 如果能满足需求,使用“路径规划”步骤搭建能够输出无碰撞规划路径的方案。 |
|
使用Mech-Viz主控机器人。 |
保持原有的软件使用方式(Mech-Center + Mech-Vision + Mech-Viz)和操作习惯。 需要先启动Mech-Center软件,然后通过它启动Mech-Vision和Mech-Viz。 |
|
使用Mech-Viz实现复杂的任务(例如混码、多抓多放、复杂路径生成)。 |
升级后的操作
迁移Mech-Vision工程到解决方案中
将未分配的Mech-Vision工程按编号迁移到解决方案下。
| 若工程未在方案下将无法使用相机标定功能。 |
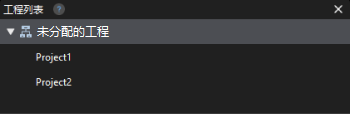
1 |
在Mech-Vision中按原工程编号依次打开工程。 此时工程在未分配的工程下。 |
|
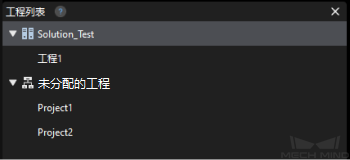
2 |
单击。 单击,选择合适路径保存方案。 |
|
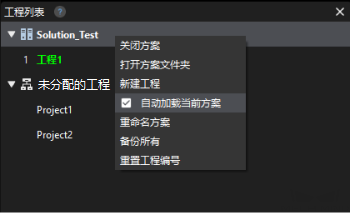
3 |
右键单击方案名称后,勾选自动加载当前方案。 |
|
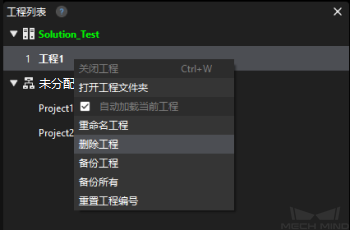
4 |
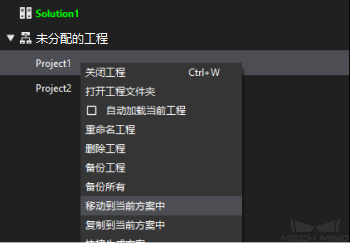
右键单击工程1在菜单中单击删除工程。 |
|
5 |
右键单击未分配工程,单击移动到当前方案中。 按顺序对所有未分配工程进行此操作。 |
|
6 |
确认工程编号与迁移之前的工程编号一致。 单击。 |
|
配置机器人通信
在Mech-Vision中完成机器人与接口配置。开始以下操作前,请确保Mech-Center处于关闭状态,并单独开启 Mech-Vision。
-
单击Mech-Vision工具栏中的机器人与接口配置。
-
在选择机器人的下拉栏中选择“品牌机器人”。
-
单击选择机器人型号,在机器人库中选择当前项目使用的机器人。
-
单击下一步进入通信配置界面。
-
根据当前项目的通信配置设置接口类型、协议、IP地址等。
-
单击应用,即开启接口服务。此时日志栏打印对应日志,工具栏中的“接口服务”处于开启状态。
修改开机自动启动
取消Mech-Center的自动启动,勾选Mech-Vision的开机自启。
-
启动Mech-Center,依次单击。
-
取消勾选开机时自动运行Mech-Center选项。
-
单击保存后,关闭 Mech-Center。
启用Mech-Vision的开机启动选项。
-
启动Mech-Vision,依次单击。
-
勾选开机启动选项后,单击确定。
为Mech-Vision工程添加“路径规划”步骤
在Mech-Vision工程中添加”路径规划”步骤,并规划机器人运动路径。
以下图所示工程为例。
-
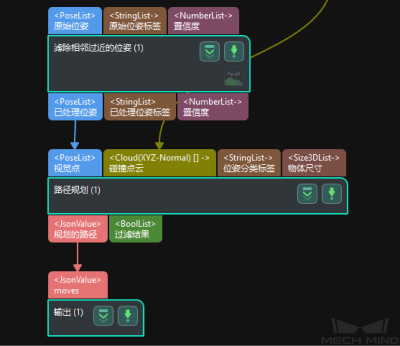
在步骤库中搜索”路径规划”并将其拖拽到工程编辑区。
-
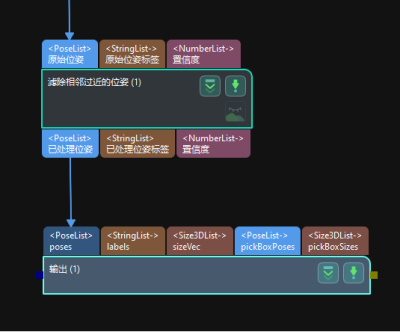
将“输出”步骤的“端口类型”参数设置为“预定义(机器人路径)”
-
参考下图,完成相应端口的连接。
-
单击“路径规划”步骤的打开路径规划工具。
-
参考 路径规划工具 来完成机器人运动路径规划。
烧录机器人接口程序
重新烧录机器人接口程序。
-
在机器人与接口配置中,选择对应品牌的机器人后,在通信配置界面单击打开烧录程序文件夹,此文件夹中的文件为标准接口程序文件和抓取例程。
-
参考 标准接口通信 完成烧录。