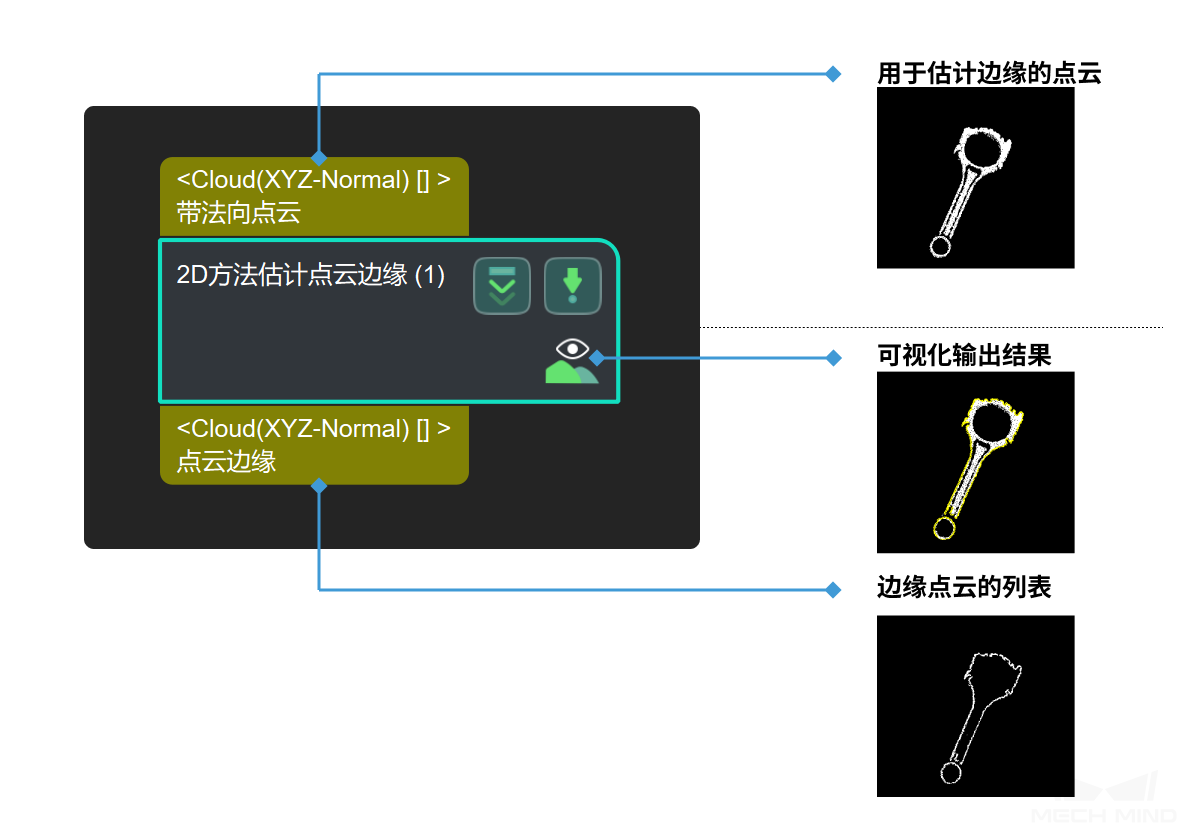
2D方法估计点云边缘
|
该步骤的内容正在维护中。如果你急需了解该步骤的更多信息,请联系我们(docs@mech-mind.net)。 |
使用场景
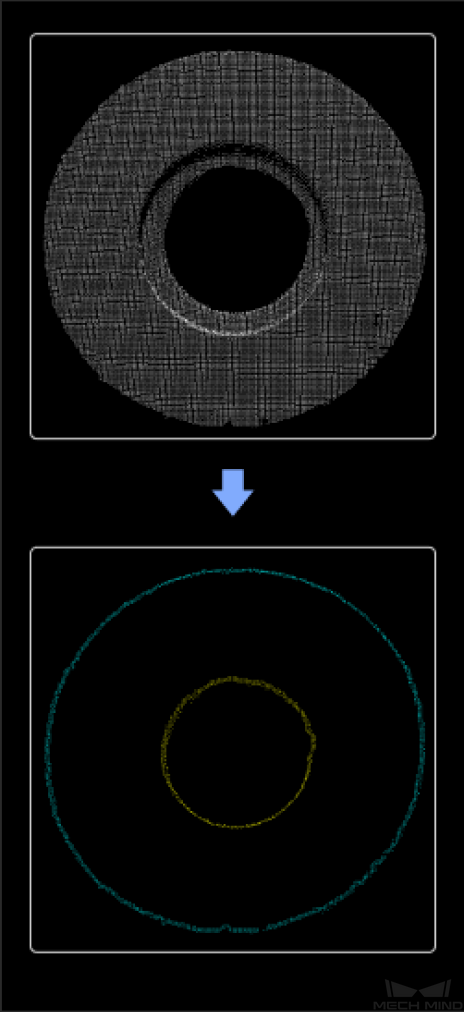
通常使用在平面工件的上料场景,通过此步骤获得平面工件的点云边缘。此步骤通常和 3D 匹配相关步骤联合使用。 此步骤的运算速度比3D边缘提取的算法更快,推荐在运行时间短、3D 点云干扰多,并且只需要提取目标物体的最外层边缘点的场景中使用。
|
该步骤的内容正在维护中。如果你急需了解该步骤的更多信息,请联系我们(docs@mech-mind.net)。 |
通常使用在平面工件的上料场景,通过此步骤获得平面工件的点云边缘。此步骤通常和 3D 匹配相关步骤联合使用。 此步骤的运算速度比3D边缘提取的算法更快,推荐在运行时间短、3D 点云干扰多,并且只需要提取目标物体的最外层边缘点的场景中使用。