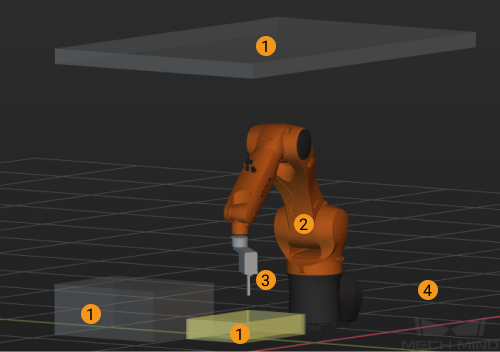
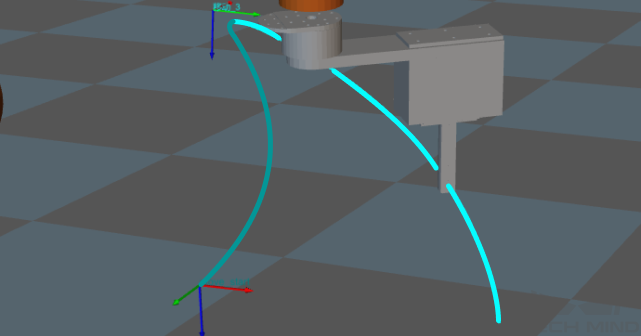
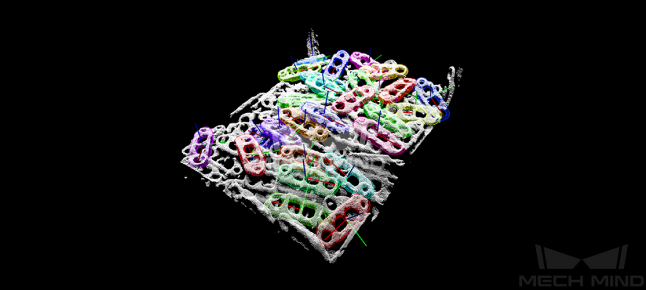
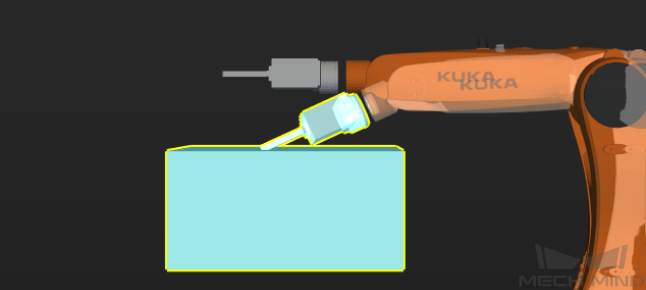
三维仿真空间 您正在查看V1.7.5版本的文档。如果您想查阅其他版本的文档,可以点击页面右上角“切换版本”按钮进行切换。 ■ 如果您想使用最新版本,可以从梅卡曼德下载中心下载。 ■ 如果您不确定当前使用的产品是哪个版本,请随时联系梅卡曼德技术支持。 三维仿真空间显示机器人、场景物体、末端工具、工件模型、机器人运动轨迹、抓取点和碰撞等,同时在三维仿真空间中可以拖拽场景物体模型。 基础操作 通过以下鼠标操作可调整三维仿真空间的显示。 旋转视角 长按鼠标左键并向任意方向拖动 视角切换菜单 单击鼠标右键 平移视角 长按鼠标中键并向任意方向拖动 缩放 滚动滑轮 场景物体显示 在工程搭建状态下三维仿真空间主要由下图所示部分构成。 ① 场景物体,② 机器人,③ 末端工具,④ 地面 运动轨迹显示 无论是在控制真实机器人运行,还是在仿真工程,三维仿真空间均可以显示机器人即将行进的轨迹。 用户可通过仿真轨迹更合理地规划机器人运动轨迹。 点云及抓取点显示 软件每次都会将视觉服务返回的视觉结果显示在三维仿真空间内。 通常,一份完整的视觉结果包括:工件点云、场景点云、工件位姿、工件序号以及代表工件特性的工件标签。 碰撞预判显示 工程运行时,Mech-Viz 会在机器人运动路径中检测机器人本体和末端工具是否会与场景物体、工件及料筐等发生碰撞。 当检测到碰撞时,软件会在三维仿真空间中将发生碰撞的双方高亮显示(如下图所示)。 该页面是否有帮助? 我要反馈 感谢您的支持! 可以通过以下方式反馈意见: 社区 反馈表单 工程资源 工作流程