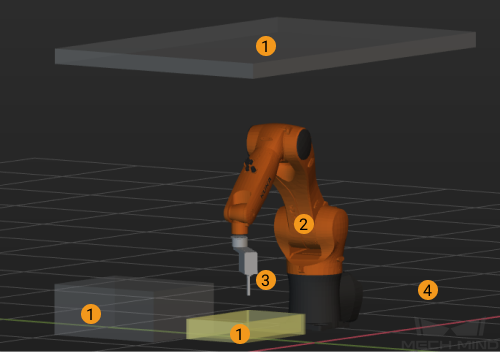
三维仿真空间
三维仿真空间显示机器人、场景物体、末端工具、工件模型、机器人运动轨迹、抓取点和碰撞等,同时在三维仿真空间中可以拖拽场景物体模型。
基础操作
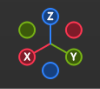
可交互坐标系显示视图的当前方向。单击任意轴标签(X、Y、Z、-X、-Y、-Z)将对齐视图到该轴。长按鼠标左键并向任意方向拖动可交互坐标系可旋转视图。
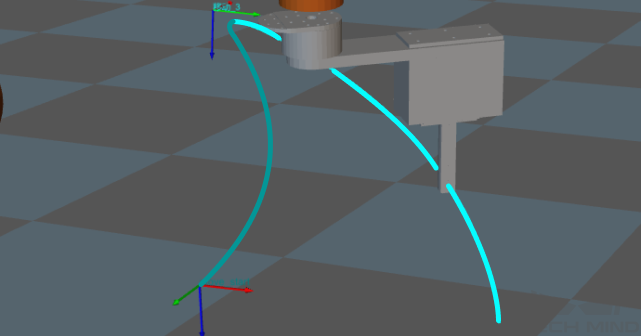
旋转视图 |
长按鼠标中键并向任意方向拖动;或长按鼠标左键并向任意方向拖动可交互坐标系。 |
平移视图 |
长按 |
缩放视图 |
长按 |
适应屏幕 |
单击 |
切换透视\正交视图 |
单击 |
显示按键 |
单击 |
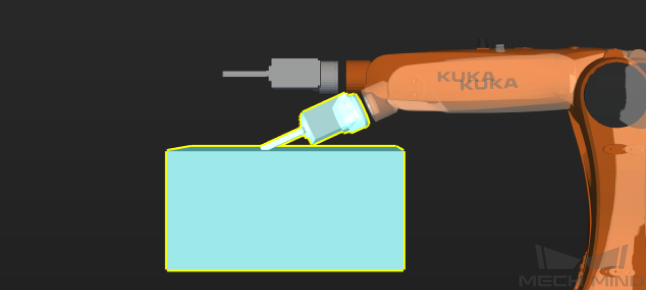
碰撞预判显示
工程运行时,Mech-Viz 会在机器人运动路径中检测机器人本体和末端工具是否会与场景物体、工件及料筐等发生碰撞。 当检测到碰撞时,软件会在三维仿真空间中将发生碰撞的双方高亮显示(如下图所示)。