更新场景物体
参数说明
非移动步骤基本参数
预规划出口
| 规划:软件尝试找到一条机器人可以在无碰撞的情况下到达目标位置的路径的过程。 |
对于可能中断规划的步骤(如:检查DI),软件无法在规划阶段提前预知此类步骤在实际执行时的出口。 因此可以指定一个预规划出口,使软件沿指定出口后的分支流程进行完整规划。通常会指定实际运行时步骤最有可能走的出口。
修正信息来源
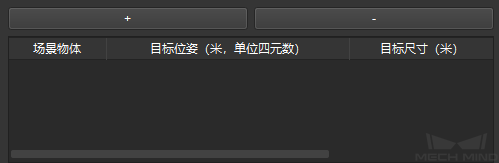
指定更新场景物体的位姿和尺寸使用的信息来源。该参数支持 从参数设置 与 从视觉服务 两种信息来源。
服务名称
选指定提供视觉服务的 Mech-Vision 工程。取值必须为已注册的 Mech-Vision 工程。
选择 Mech-Vision 工程后,请按照以下操作在 Mech-Vision 工程中配置 “输出” 步骤。
-
在步骤参数窗口中,选择 端口类型 为 Dynamic。
-
点击 设置向外部通讯输出的数据类型 打开输出设置助手。
-
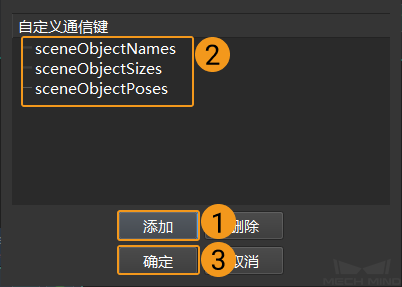
点击 添加 添加 3 个自定义通信键。
-
依次双击自定义通信键的名称,将其分别重命名为 sceneObjectNames、 sceneObjectSizes 和 sceneObjectPoses。
-
点击 确定 保存设置。
-
将输入端口与前置步骤相应的输出端口相连。
| 视觉服务返回结果 | 说明 |
|---|---|
sceneObjectNames |
需要与 Mech-Viz 中要更新的场景物体名称对应。 |
sceneObjectSizes |
包括 XYZ 三个尺寸信息(单位为米)。 |
sceneObjectPoses |
包含XYZ(单位为米)及四元数共7个数字。 |