[robot]_profile.json 文件参数释义
机器人 [robot]_profile.json 包含部分机器人基本信息,记录了机器人在软件内显示的名字、负载、可达范围、轴数、起始姿态、最大速度等内容。
以下为 [robot]_profile.json 文件的代码片段。
{
#information in the library
"robot_display_names": ["name1","name2","name3"],
"payload": [40,40,60],
"reach": 2.55,
"axes": 6,
#robot home gesture
"home_jps":[0,90,0,0,90,0],
#singularity detection
"max_tcp_vel": 7,
"max_tcp_acc": 2,
"max_joint_vel": 500,
"max_joint_acc": 100
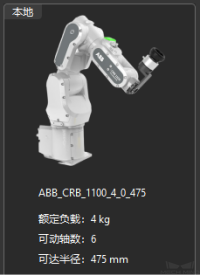
}显示在机器人模型卡片上的信息
参数 |
robot_display_names |
示例 |
"robot_display_names":ABB_CRB_1100_4_0_475 |
说明 |
机器人模型名称。 |
参数 |
"payload": [payload] |
示例 |
"payload": [4] |
说明 |
额定负载(单位kg)。 |
参数 |
reach |
示例 |
"reach":0.475 |
说明 |
可达半径(单位m)。 |
参数 |
axes |
示例 |
"axes":6 |
说明 |
可动轴数。 |
奇异点检测
以下参数用于奇异点检测。
参数 |
max_tcp_vel |
示例 |
"max_tcp_vel": 7 |
说明 |
最大TCP速度(单位m/s)。 |
参数 |
max_tcp_acc |
示例 |
"max_tcp_acc": 2 |
说明 |
最大TCP加速度(单位m/s²)。 |
参数 |
max_joint_vel |
示例 |
"max_joint_vel": 500 |
说明 |
最大关节速度(单位°/s)。 |
参数 |
max_joint_acc |
示例 |
"max_joint_acc": 100 |
说明 |
最大关节加速度(单位°/s²)。 |