从深度图分割点云
参数说明
深度图分割
以下参数全部用于分割深度图,以获取期望的点云。
- 相邻像素区域之间的最大值差异:
-
参数解释:在将深度图分割为多个区域的过程中,该参数用于指定相邻像素之间的最大高度差。相邻像素之间的高度差小于该值时,像素为同一区域。该值越大,被分割区域越多。
默认值:0.5mm。
调节建议:分割平面时,可适当调大该值。但需注意,该值过大可能导致分割区域过小而无结果。分割曲面及螺纹孔时,建议调小该值,防止所需要的点云丢失。如果点云粘连严重,调节该值,可能无法去掉不需要的点云。
- 物体最小面积:
-
参数解释:该参数用于指定深度图分割后允许的最小区域面积。像素数小于此值的区域将被去除,单位为像素(px)。该值越小,剩余区域越多;该值越大,被去除区域越大。
默认值:1500 px
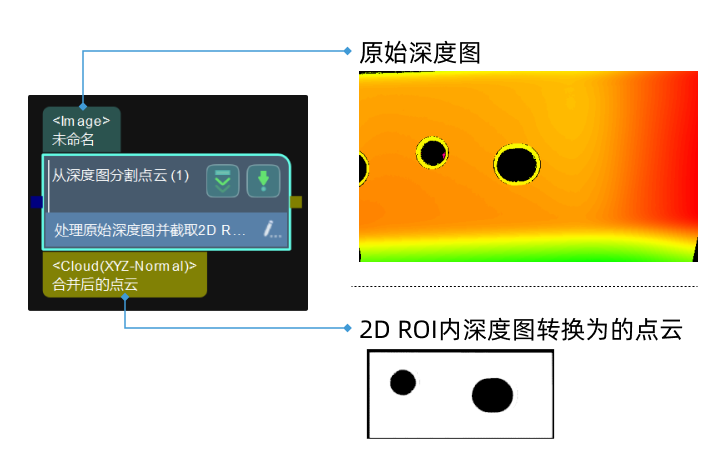
- 深度图 ROI 文件:
-
参数解释:该参数用于设置深度图感兴趣区域。
调节建议:单击设置 2D 感兴趣区域(ROI)设置准确的 2D 感兴趣区域 。