工件的旋转对称性
本文介绍工件的旋转对称性。
简介
| 本文中提到的“对称性”均指“旋转对称性”。 |
工件对称性反映了工件绕其对称轴旋转一定角度后外形可以与旋转前重合的特性。 当工件存在对称性时,用户可以基于具体需求在工件配置中设置工件的对称性相关参数。 配置工件对称性可以减少机器人在抓取、放置过程中的末端旋转,提高规划成功率,减少规划时间,让机器人动作更加流畅、快捷。
工件对称类型
旋转对称轴的确定
旋转对称轴使用的是在匹配模板与抓取点编辑器中设置的几何中心点的轴。 旋转对称轴不唯一,结合工件摆放方式、末端工具类型等其他因素,同一工件在 Mech-Vision 中几何中心点的设置可能有多种情况,进而影响旋转对称轴的确定。
下面列举了一些常见工件在常见的摆放方式下的对称类型。 如不确定所用工件的旋转对称轴,请查看匹配模板与抓取点编辑器中几何中心点的设置。






对称次数
工件绕其对称轴旋转一定角度后(a°)外形可以与旋转前重合,对称次数 N = 360°/a° 。
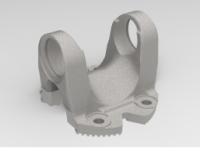
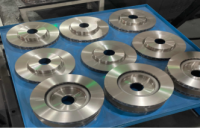
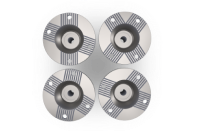
常见的长方形纸箱对称次数 N = 2,三棱柱对称次数 N = 3,圆柱体对称次数 N = 正无穷(对应软件中的圆对称)。
 |
 |
 |
 |
|---|---|---|---|
N = 2 |
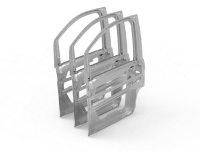
N = 4 |
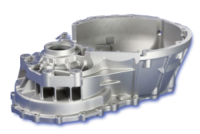
N = 9 |
圆对称 |
尝试范围
如下图所示,B与C形成的夹角即为尝试范围。

A 为末端工具在抓取点的抓取姿态,B、C为在尝试范围边界的抓取姿态
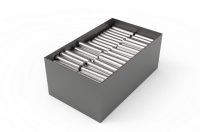
尝试范围需根据工件摆放情况、料筐形状、末端工具类型、节拍等因素设置。 尝试范围过大将降低规划速度,过小可能会遗漏可达的抓取点。
尝试次数
尝试次数根据对称次数和尝试范围自动计算。
假设对称次数 N = 10,尝试范围为 ±80°,则:对称角度间隔为 360°/10 = 36°。单边范围内的尝试次数为 80/36 = 2余8,即 2 次(分别出现在36°和72°)。总尝试次数 = 1+2*2 = 5 次,(-72°、-36°、0°、36°、72°)。